
Лазерная трехмерная сканирующая система Riegl
Все более широкое использование трехмерных технологий проектирования требует применительно к задачам модернизации и реконструкции включения в состав комплекса автоматизации эффективного инструмента для создания трехмерной модели объекта проектирования. Аналогичная ситуация наблюдается и для вновь проектируемых объектов, предполагающих множественные взаимосвязи с существующей инфраструктурой. Особенно это касается объектов с неполной или неактульной проектной документацией.
Качественный скачок в направлении создания такого инструмента произошел с появлением безотражательных систем измерения и разработкой на их основе трехмерных лазерных сканирующих систем. Принцип действия трехмерного сканера — выполнение в автоматическом режиме с заданным шагом последовательных тахеометрических измерений со скоростью до нескольких тысяч в секунду с получением в результате трехмерного растра или скана в виде облака точек с известными координатами.

Сканер Riegl LMS-Z390i
В настоящее время некоторые производители предлагают линейки наземных лазерных сканирующих систем различного назначения для решения задач в геодезии, маркшейдерии, изысканиях, проектировании, архитектуре и археологии.
Для решения типовой задачи создания трехмерной модели промышленного технологического объекта рассмотрим систему на базе лазерного сканера LMS-Z390i производства австрийской компании Riegl — одного из лидеров рынка лазерных сканирующих систем.
Измерительный комплекс представляет собой лазерный трехмерный сканер Riegl LMS-Z390i и полевой портативный компьютер со специализированным программным обеспечением RiSCAN PRO, поставляемым вместе со сканером. Передача данных между сканером и компьютером может осуществляется через сетевой интерфейс, что позволяет использовать и беспроводные технологии.
Сканирование выбранной области (объекта) выполняется в автоматическом режиме импульсным лазерным лучом при помощи оптико-механической системы. Горизонтальное перемещение обеспечивается поворотной платформой сканера, вертикальное — отклоняющими зеркалами. Стоит отметить, что элементы системы надежно защищены от агрессивных факторов окружающей среды. Данные измерений и панорамные снимки с камеры высокого разрешения, установленной на сканере, поступают на портативный компьютер, где встроенная система визуализации выводит на экран компьютера изображение, позволяющее оператору контролировать процесс сканирования, изменяя при необходимости поле зрения сканера, область и разрешение сканирования. Поверхность сканируемого объекта регистрируется программным обеспечением в виде трехмерного растра или скана, представляющего собой массив точек, описанных тремя координатами, а также значениями показателя интенсивности отражения или «истинного» (RGB) цвета. Технические характеристики сканера приведены в таблице.
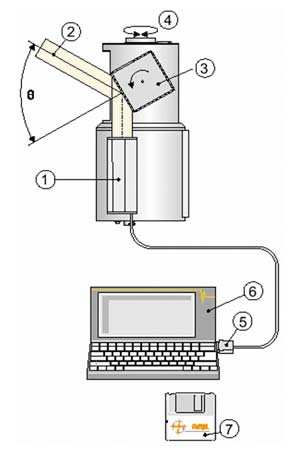
Схема работы трехмерного сканера: 1 Лазерный дальномер. 2 Лазерный луч. 3 Вращающаяся полигональная зеркальная призма. 4 Вращающаяся оптическая головная часть. 5 Кабель передачи данных на LPT-порт PC. 6 PC. 7 Программное обеспечение Riegl 3D RiSCAN.
В зависимости от задач, объекта и условий проведения измерений система может комплектоваться дополнительным оборудованием и аксессуарами: внутренним датчиком наклона для вертикальной установки сканера, термостабилизирующей рубашкой для работы в условиях низких температур, мобильной платформой для перемещения сканера, модулем беспроводной передачи данных и др. Например, для оборудования мобильной сканирующей станции на автомобиле, выполняющей сканирование в процессе движения, необходимы съемная подставка для GPS-антенны, внутренний таймер для GPS-синхронизации данных сканирования, ударопоглощающая подставка и пр.
Модули программного обеспечения RiSCAN PRO, поставляемого вместе со сканером, также можно рассматривать как базовые и опциональные. Базовый модуль, кроме упоминавшейся уже функции приема и регистрации данных, обеспечивает их организованное хранение в структуре проекта. Данные проекта RiSCAN включают непосредственно трехмерные сканы, а также цифровые изображения, полученные с камеры, данные GPS, координаты опорных точек и точек привязки, трансформационные матрицы, необходимые для преобразования данных множественных сканов в общую заданную систему координат. RiSCAN PRO обеспечивает визуализацию и первичную обработку сканов, которая может быть произведена прямо в полевых условиях. Визуализированное трехмерное облако точек можно просмотреть, используя методы 3D-навигации с записью, при необходимости в виде анимационного ролика. При этом окраска точек может быть выполнена по определенному параметру — удаленности, интенсивности отражения или в истинных цветах.
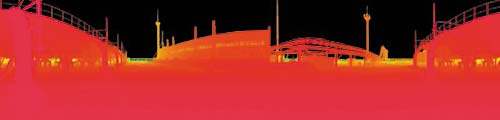
а
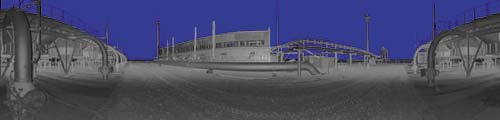
б
 в
в
Визуализация сканов с окраской в различных режимах: а — по удаленности; б — по коэффициенту отражения; в — в истинных цветах
Для обработки данных RiSCAN PRO предоставляет функции редактирования: удаление пробелов, удаление точек, прореживание, сглаживание, фильтрация. По выбранным массивам точек возможно создание триангуляционных поверхностей и геометрических объектов. Непосредственно по облаку точек можно производить ряд оценочных операций, таких как определение расстояний, вычисление площадей и объемов. После первичной обработки данные могут быть переданы в CAD-приложения с использованием функции экспорта в наиболее распространенные форматы.
Технические характеристики трехмерной лазерной сканирующей системы Riegl LMS-Z390i
Параметры |
Значения |
Максимальное измеряемое расстояние |
До 400 м |
Минимальное измеряемое расстояние |
1 м |
Точность измерений расстояний — средняя |
От 2 до 4 мм |
Скорость сканирования |
От 8000 до 11 000 точек/с |
Поле зрение сканирования |
80x360° |
Расходимость лазерного луча |
0,25 мрад |
Класс безопасности |
1 |
Класс защиты |
IP 64 |
Рабочее напряжение |
12-28 В постоянного тока |
Потребляемая мощность |
До 68 Вт |
Рабочий диапазон температур |
От 0 до + 40 °C; от –25 до + 50 °C |
Основные размеры (диаметр x высота) |
210x463 мм |
Вес |
15 кг |
Дополнительные модули RiSCAN PRO расширяют функциональность и увеличивают эффективность использования приложения. Модуль Multi-Station Adjustment выполняет регистрацию и уравнивание нескольких взаимно перекрывающихся сканов. Как правило, для полноценного представления объекта необходимо выполнение нескольких сеансов сканирования из различных точек. Высокоэффективный алгоритм, реализованный в данном модуле, позволяет автоматически выполнить процесс выравнивания данных сканирования методом ближайших повторяющихся точек, а также по опорным точкам и точкам привязки.
Модуль Camera необходим для получения цифровых изображений с камеры и их комбинированиия с трехмерными сканами за счет точной калибровки цифровой камеры. Имея набор цифровых изображений, выполненных из точки сканирования с помощь модуля Orthophoto, и данных сканов, можно получить из них истинные ортофотоснимки с информацией о глубине. Имеется также отдельный модуль для удаления из сканов точек, соответствующих растительным элементам ландшафта.
Дальнейшая обработка результатов сканирования при необходимости может выполняться в направлении трехмерной векторизации, позволяющей сократить размер файлов и дающей возможность напрямую использовать данные в приложениях САПР. Для векторизации применяются программные приложения сторонних разработчиков, как правило, реализованные в виде модулей расширения для популярных CAD-систем (AutoCAD, MicroStation). Одно из лучших решений для платформы AutoCAD — приложение K ubit Pointcloud, дающее возможность работать в AutoCAD с облаком точек, преобразовывать группы точек в трехмерные объекты из пополняемой базы данных, соответствующие геометрическим примитивам, строительным конструкциям и профилям, элементам оборудования и трубопроводных систем.
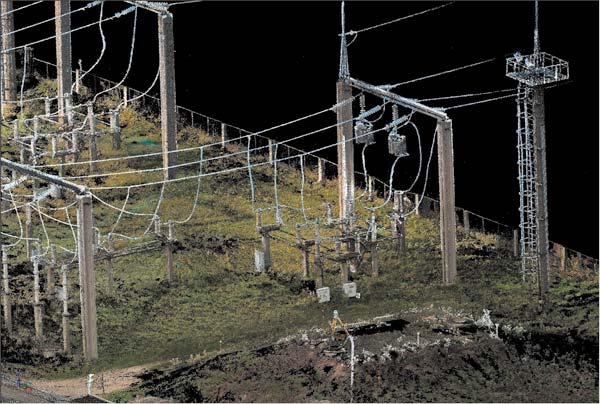
а
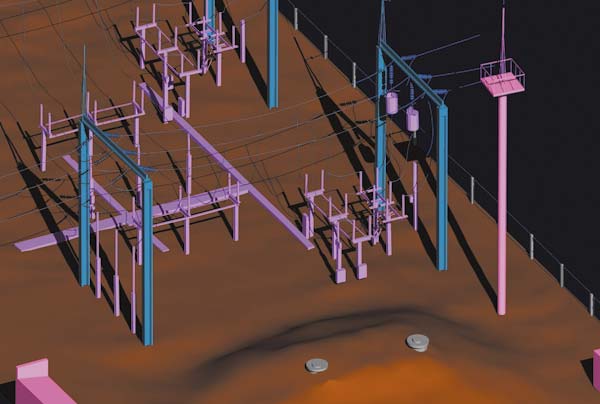
б
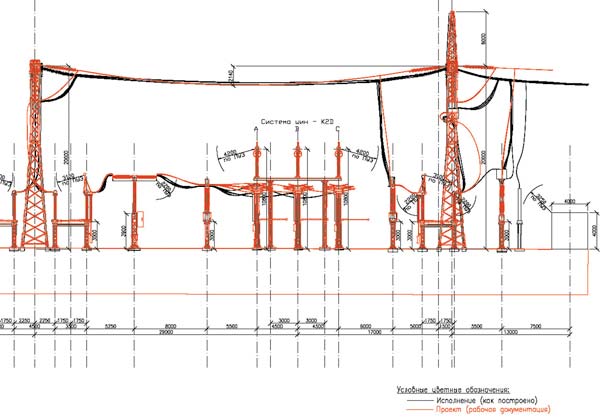 в
в
Эволюция данных трехмерного сканирования: а — облако точек; б — трехмерная твердотельная модель; в — проектная документация
Несмотря на то что в начале статьи речь шла о решении задач, связанных с проектированием, круг применения технологий трехмерного сканирования значительно шире: исполнительная съемка, восстановление (актуализация) документации, создание информационных моделей, техническое освидетельствование, создание планов трасс инженерных коммуникаций, инвентаризация и мониторинг состояния объектов и оборудования, прогнозирование и анализ последствий ЧС.
Достоинства метода лазерного трехмерного сканирования очевидны:
- мгновенная трехмерная визуализация;
- высокая точность;
- несравнимо более полные результаты;
- оперативный сбор данных;
- обеспечение безопасности при съемке труднодоступных и опасных объектов.
