
Применение методов синтеза и математического моделирования для исследования движущих систем наземных мобильных роботов
Одним из эффективных способов противодействия террору является разработка наземных мобильных роботов (МР), предназначенных для выявления и ликвидации взрывоопасных устройств (ВУ), которые направлены на уничтожение гражданского населения, а также на разрушение объектов.
Классификация, состав и функциональные возможности таких роботов подробно описаны в технической литературе. Учитывая изложенные в этих работах материалы, любой наземный МР специального назначения может быть представлен в виде совокупности трех больших систем: транспортной, рабочей и системы управления.
Транспортная система предназначена для доставки рабочего оборудования к месту проведения операции и играет решающую роль в возможности функционирования МР в недетерминированных (неорганизованных) средах (природные среды и среды, создаваемые аварийными ситуациями как в природных условиях, так и при разрушении сред, созданных человеком). В данной статье речь пойдет о методе разработки и исследования движущих систем (ДС) транспортных средств (ТС) наземных МР, предложенном специалистами ОАО «Специальное конструкторское бюро приборостроения и автоматики» (ОАО «СКБ ПА», г.Ковров) при содействии специалистов из НИИ СМ МГТУ им. Н.Э.Баумана (г.Москва) и ЦСТ ФСБ России.
Понятие ДС включает совокупность двигательных, передаточных и исполнительных устройств, взаимодействующих друг с другом с целью обеспечения требуемых тяговых, разгонных и скоростных характеристик, а также показателей опорной и профильной проходимости ТС. Создание ДС является весьма трудоемкой задачей, требующей от разработчика анализа среды функционирования МР, предъявляемых к ТС требований, определения нагрузок действующих на элементы ДС, выбора компоновочной схемы ДС, выбора параметров элементов ДС и т.п.
Существующие методы проектирования и исследования ДС наземных ТС общего назначения в большинстве случаев базируются на упрощенных аналитических зависимостях, полученных путем рассмотрения плоских моделей равновесного движения ТС (при оценке и исследовании тягово-динамических свойств машины), упрощения схем взаимодействия движителей с грунтом (при определении показателей опорной проходимости машины), исключения нелинейностей, связанных с отрывом элементов движителей от опорной поверхности (при исследовании профильной проходимости и динамической устойчивости машины) и т.п. Основные недостатки таких методов заключаются в необходимости выполнения большого объема вычислительных работ без использования ЭВМ, разрозненности проводимых расчетов и неточности получаемых результатов, трудности исследования взаимного влияния параметров ДС, МР и среды их функционирования на характеристики и показатели проходимости ТС.
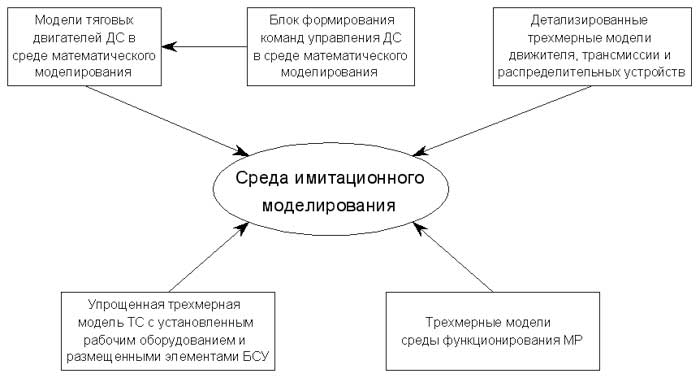
Рис. 1. Упрощенная структурная схема синтеза математического и имитационного моделирования
С целью исключения перечисленных недостатков предлагается при разработке и исследовании ДС опираться на синтез математического и имитационного моделирования. Данный подход объединяет в едином информационном пространстве связанные расчетные программы и имитационные модели, описывающие движение МР в реальных условиях работы. Упрощенная структурная схема синтеза показана на рис. 1.
Согласно приведенной схеме синтез математического и имитационного моделирования достигается путем функционального объединения в среде имитационного моделирования блоков формирования команд управления, моделей тяговых двигателей, трехмерных моделей механической части ДС, МР и среды его функционирования. Блоки формирования команд управления с корректирующими устройствами и моделями тяговых двигателей предварительно объединяются в среде математического моделирования (например, в Matlab или Simulink) с целью минимизации числа перекрестных связей между элементами, участвующими в синтезе. Детализированные трехмерные модели движителя, трансмиссии и распределительных устройств создаются с использованием известных пакетов твердотельного моделирования (например, в Autodesk Inventor Series 10) (рис. 2). Они же применяются и при создании трехмерных моделей среды функционирования МР (завалов, уклонов, эскарпов, впадин, горизонтальных участков и т.п.). Характеристики несущих поверхностей (деформативность, сопротивление касательным сдвигам, боковому срезу и т.д.), с которыми взаимодействует движитель ТС, задаются непосредственно в среде имитационного моделирования.
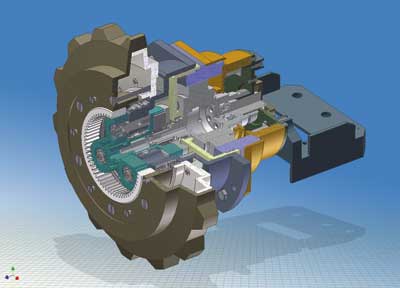
Рис. 2. Трехмерная модель мотор-звездочки движущей системы в среде Autodesk Inventor Series 10
Алгоритм проведения расчетных и исследовательских работ при создании ДС наземных МР с использованием синтеза математического и имитационного моделирования представлен на рис. 3.
Рис. 3. Алгоритм проведения расчетных и исследовательских работ
С блоков формирования команд управления поступают управляющие воздействия на тяговые двигатели ДС. Развиваемые двигателями моментные усилия и угловые скорости посредством блоков сопряжения передаются в среду имитационного моделирования (например, в MSC.visualNastran 4D) (рис. 4), где приводят в движение элементы трансмиссии, распределительные устройства и движитель ДС, конструктивно объеденные с моделью МР.
Рис. 4. Упрощенная модель тягового двигателя мотор-звездочки с блоком сопряжения
При моделировании движения МР учитываются его геометрические и конструктивные параметры (положение центра масс, массогабаритные характеристики, клиренс ТС и т.п.), характер взаимодействия его движителя с опорной поверхностью (отрыв от опорной поверхности, сцепление, скольжение, буксование, ударное воздействие и т.п.), а также его управляемость и поворачиваемость (рис. 5).
Рис. 5. Преодоление МР порогового препятствия в имитационной модели
Нагрузки, действующие на исполнительные узлы ДС в среде имитационного моделирования, и сигналы обратной связи с датчиков, установленных на МР, поступают (посредством блоков сопряжения) на тяговые двигатели и блоки формирования команд управления ДС ТС. Знание нагрузок позволяет определять энергозатраты (влияющие на длительность непрерывной работы МР от автономных источников питания) и показатели эффективности работы ДС (характеризующие механические потери в ДС) при движении и маневрировании МР.
Надежность работы узлов и механизмов ДС при воздействии на них внутренних (обусловленных развиваемыми и передаваемыми моментными усилиями в приводах и элементах ДС) и внешних нагрузок (обусловленных взаимодействием движителя ТС с опорной поверхностью) в процессе движения и маневрирования МР проверяется путем проведения соответствующих прочностных расчетов в среде имитационного моделирования (например, в MSC.visualNastran 4D) (рис. 6).

Рис. 6. Прочностной расчет элементов планетарного редуктора в среде MSC.visualNastran 4D
Одним из существенных достоинств предложенного метода разработки и исследования ДС ТС наземных МР является возможность распределения задач разработки, требуемых для синтеза моделей, среди специалистов предприятия, что позволяет существенно сократить время расчетно-проектировочных работ при создании ДС ТС.
Таким образом, основываясь на синтезе математического и имитационного моделирования, можно с минимальными временными и материальными затратами проводить объемный анализ характеристик и показателей ТС с целью оптимизации параметров его ДС и обеспечения надежности его работы в реальных условиях эксплуатации.
Авторы статьи благодарят «Русскую Промышленную Компанию» (www.cad.ru) за предоставленное для тестирования ПО Autodesk Inventor Series 10.
Демо-версию Autodesk Inventor Series 10, а также другие программные продукты Autodesk можно заказать в «Русской Промышленной Компании».
Информация о программе, ценах, семинарах и курсах обучения, а также о специальных акциях есть на сайте www.cad.ru.

