
Autodesk Inventor 11 Professional: Dynamic Simulation — динамическое моделирование в действии
В начале лета этого года компания Autodesk объявила о выходе новой линейки своих продуктов. Среди них — программный комплекс Autodesk Inventor 11 Professional, в который, помимо прочих нововведений, включен модуль Dynamic Simulation.
Dynamic Simulation (Динамическое моделирование) дает возможность определить, насколько эффективно будет функционировать проектируемая машина в реальных условиях. Модуль позволяет задать силы, действующие на механизм, определить скорости, ускорения и усилия, возникающие в узлах механизма при движении.
Рассмотрим основные возможности модуля.
Чтобы перейти в режим Dynamic Simulation, необходимо из меню Applications выбрать опцию Dynamic Simulation — запустится модуль кинематического анализа механизмов.
Первое, что удивляет, — это небольшой набор команд, которых, тем не менее, достаточно для проектирования и анализа любого работающего механизма.
Ознакомимся с основным инструментом Simulation Panel (Панель имитации) — главной панелью управления движением механизма (рис. 1).
Этот инструмент позволяет запустить, а также настроить визуальное отображение движения механизма.
Теперь спроектируем простейший механизм и рассмотрим работу модуля.
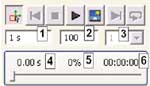
Рис. 1. Панель имитации
Joints (Шарниры)
Для динамического моделирования нам понадобятся шарниры.
Каждый шарнир описывается неким равенством, показывающим степени свободы кинематической пары и координаты, которые должны быть совмещены у деталей для получения шарнира. Вызвав справку в окне Joint Table, можно увидеть список определений шарниров.
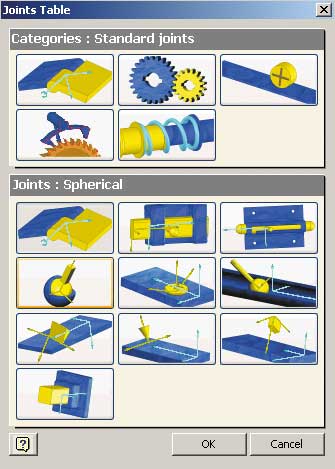
Рис. 2. Список шарниров
Рассмотрим список стандартных шарниров — Standard Joints.
Взглянув на изображение шарниров (рис. 2), можно увидеть, что к каждой детали привязана система координат. Это очень важный момент, поскольку именно положение системы координат узла и направление осей определяют работу шарнира. Еще нужно отметить, что деталь, окрашенная в синий цвет, является относительно неподвижным звеном, а в желтый — подвижным.
Расскажем подробнее о системе координат узла. Стрелками показывается система координат с осями:
• ось с одной стрелкой (→) означает ось Х;
• ось с двумя стрелками (→→) — Y;
• ось с тремя стрелками (→→→) — Z;
• буква «О» означает Origin (начало) — центр соединения, то есть точку, к которой привяжется система координат шарнира.
При создании шарнира, конечно, можно указать только одну координату, остальные будут поставлены по умолчанию, но это нежелательно, поскольку программа может задать неверные направления осей и вы потеряете контроль над шарниром. Правильный выбор направления осей очень важен в случае, когда шарниров у одной детали несколько, поскольку при ошибке шарниры будут противоречить друг другу и механизм не будет работать.
Рассмотрим самую распространенную категорию шарниров — Standard Joints (Стандартные шарниры) на примере шарнира Revolution (Вращение) (см. рис. 2).
Шарнир Revolution (Вращение) определяется формулой:
Z1=Z2 and O1=O2 [1].
Шарнир состоит из цилиндрических деталей. Данный шарнир имеет одну степень свободы — вращение вокруг ОZ.
Теперь внимательно посмотрим на форму Insert Joint (Вставка шарнира) и на формулу [1], описывающую шарнир (рис. 3).
Рис. 3. Вставка шарнира
Рис. 4. Создание детали
Нам предлагается задать три параметра: Z axis (ось Z), Origin (центр шарнира) и X axis (ось X).
Формула Z1= Z2 показывает, что ось O1Z1 должна совпасть с осью O2Z2 . Как правило, вращение происходит вокруг оси Z, а точка О — это как раз центр шарнира. Нужно задать оси цилиндрических деталей и плоскости, по которым совместятся детали — центры окажутся на пересечении осей с плоскостями.
Ось X, как видно из формулы, не является обязательной, а ось Y выставляется автоматически перпендикулярно осям X и Z.
Для примера создадим в программе Autodesk Inventor 11 Professional две детали, похожие на дверные петли. При создании сборки никаких зависимостей налагать не будем, но одну из деталей — Деталь1 — зафиксируем, зададим свойство Grounded (рис. 4). Перейдем в модуль Dynamic Simulation.
Обратим внимание, что первой в форме Insert Joint задается неподвижная деталь (синий цвет), а затем — подвижная деталь шарнира (желтая).
Будем создавать шарнир, расписывая подробно по пунктам ход работы.
1. Выполним команду Insert Joint модуля Dynamic Simulation.
2. В выпадающем списке формы выберем тип шарнира Revolution.
3. Нажмем кнопку Out of Place, включив режим разъединенного шарнира. Это необходимо для того, чтобы после задания шарнира детали автоматически совместились.
4. Зададим оси первой неподвижной детали шарнира Component 1. Зададим ось Z, указав цилиндрическую часть Детали 1 (рис. 5).
5. В качестве центра укажем плоскость.
6. В качестве направления оси Х — одно из ребер детали.
Посмотрите на систему координат: она поместилась в центр цилиндра и лежит на указанной нами плоскости, все оси расположены так, как мы и задавали.
Рис. 5. Назначение осей первой детали
Рис. 6. Назначение осей второй детали
Теперь необходимо задать оси на Деталь 2, аналогично тому, как мы это сделали для Детали 1 рис. 6).
Для направления оси Х зададим то же ребро, что было задано на Деталь 1. Обратите внимание, что кнопками на форме можно менять направления осей.
После нажатия кнопки ОК детали должны совместиться (рис. 7), что соответствует действительности, так как оси Х располагаются в одном направлении.
Рис. 7. Совмещение деталей
Рис. 8. Совмещение деталей под углом
Теперь перейдем к самому интересному моменту — организации движения механизма.
Для удобства поменяем положение оси Х на Деталь 2. Выберем короткое ребро нижнего основания, то есть направление оси Х2 будет под углом 90° к оси Х1 (рис. 8). В результате детали расположились под прямым углом друг к другу. Если требуется другой угол, то необходимо задать его предварительно, по-строив рабочую плоскость.
Проверим работоспособность шарнирного механизма. Захватите мышью и подвигайте Деталь 2 — вы увидите, что доступно только вращение детали вокруг оси Z. Это верно, так как шарнир Revolution обеспечивает лишь одну степень свободы, как было сказано выше.
Механизм работает, значит, всё сделано правильно! Теперь можно прикладывать силы и реакции.
1. Зададим силу, которая будет вращать Деталь 2 (рис. 9). Для этого выполните команду Force (сила), программа потребует указать точку. Укажите один из углов Детали 2 и задайте направление (см. рис. 9). Величину силы укажем равной одному ньютону, оставив при этом нажатой кнопку Fixed Load Direction (Постоянное направление силы).
Рис. 9. Силы и реакции
2. Зададим в Simulation Panel (Панель имитации) время работы механизма, равное 2 с (см. рис. 1). Нажмем кнопку «Пуск». Деталь 2 должна начать колебательное движение (качаться).
3. Добавим воздействие гравитации. Для этого вызовите контекстное меню на элементе Gravity (Гравитация) и выполните команду Define Gravity (Задать гравитацию). В качестве плоскости можно указать ребро или плоскость на детали из раздела Grounded (Зафиксированный) браузера. Задайте грань (см. рис. 9).
4. Добавим Trace (След). Для этого вызовите контекстное меню на элементе Trace браузера. Укажите точку отслеживания на подвижной детали (Деталь 2) и установите все галочки с заданием параметров масштаба векторов силы и ускорения (рис. 10).
Рис. 10. Задание векторов
Рис. 11. Движение механизма
5. Запустите механизм, пронаблюдайте за движением детали. Должно получится так, как показано на рис. 11.
6. Сейчас наш механизм работает без затухания, потому что не хватает сил реакций, например силы трения. Для задания силы трения вызовите свойства шарнира, в появившемся окне перейдите на вкладку dof 1 (R) и нажмите кнопку Edit Joint Torque (Редактировать шарнир в направлении вращения). Установите галочку Enable joint torque, включающую пользовательские настройки шарнира. Задайте свойству Damping (Торможение, трение) значение 0,001 N*mm*s/deg (рис. 12).
Рис. 12. Задание сил реакции
7. Запустите механизм. Обратите внимание, что качание Детали 2 вследствие заданного трения в шарнире теперь происходит с затуханием и через 2 с деталь практически останавливается.
Теперь можно считать, что работа реального механизма полностью смоделирована. Остается определить численные значения параметров механизма, таких как скорость, ускорение, перемещение, сила, момент и т.д. Их вызов доступен по команде Output Grapher (Выходной самописец) панели инструментов.
8. Выведем график значений скорости и уско-рения в шарнире. Для этого выполним команду Output Grapher, в появившемся окне раскроем список параметров единственного шарнира Revolution и поставим галочки в группах Velocities и Accelerations (скорости и ускорения соответственно). На графике отобразятся кривые скорости и ускорения (рис. 13).
Рис. 13. График работы механизма
Таким же образом можно вывести и другие параметры в окно графика.
На самописец можно вывести все возможные кривые скоростей, ускорений, усилий и прочие характеристики шарниров, затем с помощью команды Export Data to Excel (экспортировать данные в программу MS Excel) вы-грузить в Excel для сравнения и дальнейшего анализа данных при различных конфигурациях механизма.
Подводя итоги работы с Dynamic Simulation в программном комплексе Autodesk Inventor 11 Professional, можно сказать, что данный модуль будет незаменим при проектировании таких механизмов, как роторные линии, поршневые устройства, механические манипуляторы и многие другие, где необходимо использовать методы динамического моделирования.
Автор статьи благодарит «Русскую Промышленную Компанию» за оказанную консультативную помощь в подготовке данного материала и за предоставление демо-версии Autodesk Inventor 11 Professional.
Получить подробные консультации специалистов «Русской Промышленной Компании» можно по е-mail: info@cad. Информация о программах, ценах, семинарах и курсах обучения, а также о специальных акциях на сайте www.cad.ru.

