
Применение системы инженерного анализа FlowVision для решения прикладных задач гидродинамики судна
Решение прикладных задач гидродинамики судна имеет большое практическое значение при проектировании кораблей и судов, разработке проектов их модернизации и переоборудования. Классические задачи гидродинамики судна — получение буксировочных характеристик корпуса, гидродинамических характеристик движителя, отработка взаимодействия корпуса и движительного комплекса — содержат в себе проявления многообразных физических явлений и весьма сложны для теоретического изучения. Вероятно, по этим причинам основные методики решения таких задач в отечественной и зарубежной судостроительной промышленности развивались как расчетно-экспериментальные, базирующиеся на схемах частичного моделирования.
Развитие систем автоматизации проектирования (САПР) и систем инженерного анализа (СИА), реализующих численные методы решения уравнений движения вязкой жидкости, открыло новое направление в подходах к изучению задач гидродинамики судна. Долгое время это направление не ассоциировалось с возможностью получения практических результатов как из-за математических сложностей, так и по причине недостаточной производительности компьютеров. Сегодня эта проблема решается, но лишь за счет применения ведущих СИА, число которых на мировом рынке невелико.
Опытом использования СИА FlowVision и практическими результатами, достигнутыми с ее помощью в решении задач гидродинамики судна, авторы хотели бы поделиться с читателями.
СИА FlowVision в свое время была выбрана в качестве составляющей автоматизированной схемы создания качественных проектов судов, включающей также другой российский программный продукт — САПР T-Flex CAD. Поэтому некоторые аспекты применения FlowVision рассмотрены с учетом особенностей параметрических моделей геометрии объектов гидродинамического анализа, созданных с помощью САПР T- Flex CAD.
Численное моделирование обтекания корпусов морских судов с помощью комплексов гидродинамического анализа в настоящее время приобретает практическое значение в задачах проектирования судна. Получение полной картины потока, обтекающего корпус, на ранних стадиях его проектирования позволяет качественно решать задачи оптимизации формы корпуса и конфигурации выступающих частей; изучения условий работы движителей, рулевых и подруливающих устройств; нахождения характеристик ходовой посадки быстроходных судов; определения мощности энергетической установки судна.
Совершенно очевидно, что все перечисленные преимущества методов вычислительной гидромеханики могут быть в полной мере реализованы только при хорошей согласованности получаемых результатов с наиболее надежными экспериментальными и теоретическими данными. Тестовые расчеты обтекания корпусов судов различного типа, выполненные специалистами Digital Marine Technology (DMT) в СИА FlowVision, продемонстрировали результаты, сопоставимые с экспериментальными показателями, полученными в лучших гидродинамических лабораториях мира.
Рис. 1. Результаты расчетов FlowVision и эксперимента по контейнеровозу KCS
К примеру, результаты расчетов и эксперимента по крупнотоннажному скоростному контейнерному судну представлены на рис. 1. Выполнение численных исследований и подробное изучение полученных результатов оказалось возможным благодаря опубликованной в Интернете информации о выполненных в Корейском исследовательском институте корабля и океанотехники (Korea Research Institute for Ships and Ocean Engineering) буксировочных испытаниях модели контейнерного судна. Испытания проводились в рамках разработки проекта перспективного судна для тихоокеанских контейнерных линий (KCS).
Опытный бассейн Корейского исследовательского института корабля и океанотехники имеет размеры чаши 220x16Ѕ7 м, позволяет производить буксировку со скоростью до 6 м/с и оборудован современной измерительной аппаратурой. Учитывая также, что рассматриваемое судно имеет классические для судов этого типа обводы корпуса, которые хорошо изучены, экспериментальные данные можно считать вполне надежными.
Корпус судна в расчетах представлен точной геометрической моделью, созданной корейскими специалистами и опубликованной в Интернете вместе с результатами модельного эксперимента. Моделирование корпуса в используемом численном методе имеет важную особенность: возможно его движение относительно системы координат расчетной области и начальной сетки (технология фильтра подвижного тела), что позволяет моделировать свободную посадку при буксировке. Разница в буксировочном сопротивлении для свободной посадки и жесткого закрепления модели в гидростатическом положении, однако, оказывается значительной лишь при достаточно больших числах Фруда. Поэтому в целях экономии вычислительных ресурсов целесообразно моделировать свободную посадку лишь там, где это действительно необходимо.
Для закрепленной модели хорошее совпадение расчетных и экспериментальных данных наблюдается вплоть до 24 узлов (Fr = 0,26). Лишь при 26 узлах (Fr = 0,28) закрепленная модель в расчетах имеет заметно более низкое сопротивление, чем модель со свободной посадкой.
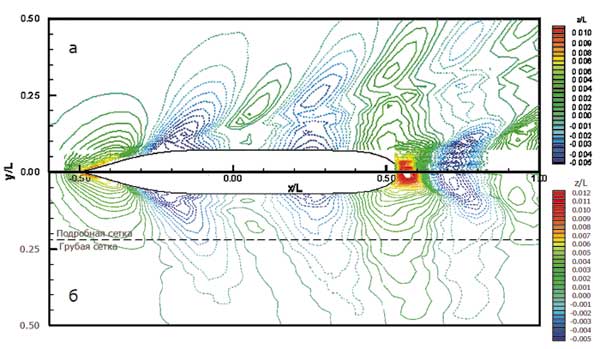
Рис. 2. Линии равных уровней свободной поверхности по данным: а — эксперимента при Fr = 0,26, Re = 1,4e7; б — численного расчета при Fr = 0,26, Re = 2,8e9
Рис. 3. Волновой профиль ° — эксперимент при Fr = 0,26, Re = 1,4e7; ----- — численный расчет при Fr = 0,26, Re = 2,8e9
Данные, полученные при изучении волновой системы судна в ходе модельного эксперимента и численных расчетов, представлены на рис. 2 и 3 в графической форме, избранной корейскими специалистами при оформлении экспериментальных результатов.
Примером использования СИА FlowVision в практических целях является отработка обводов судна смешанного плавания дедвейтом около 6750 т. Традиционный способ решения такой задачи связан с проведением ряда модельных экспериментов в опытном бассейне с целью отработки обводов корпуса и взаимодействия элементов движительно-рулевого комплекса. Однако из-за предельно коротких сроков проектирования в большинстве проектов судов ограниченного района плавания, разрабатываемых сегодня в нашей стране, результаты модельных экспериментов не используются, хотя зачастую необходимость в этом гораздо больше, чем в проектах океанских лайнеров. Как известно, в советском торговом флоте грузовые суда ограниченного района плавания строились в основном крупными сериями, а проработка их ходовых качеств выполнялась на основе анализа результатов многочисленных модельных экспериментов. Как следствие, продуманность обводов корпуса и элементов движительно-рулевого комплекса судов советских проектов до сих пор является эталоном для специалистов.
В настоящее время модельные испытания в рамках проекта если и проводятся, то лишь для проверки достижения судом контрактных ходовых качеств. К сожалению, серии модельных испытаний с целью оптимизации геометрии судна сегодня практически не выполняются из-за сжатых сроков.
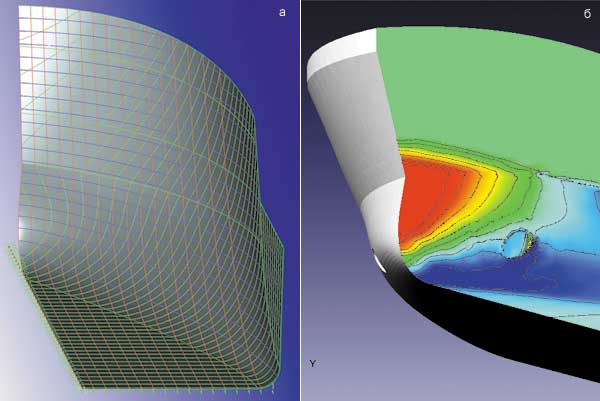
Рис. 4. Носовая оконечность судна: а — модель теоретической поверхности (T-Flex CAD); б — распределение динамического давления (FlowVision)
Выход из сложившейся ситуации специалисты DMT видят в выполнении необходимых проработок на базе современных методов вычислительной гидродинамики. В этом случае можно получать не только величину сопротивления, но и картины распределения физических величин в потоке и по поверхности корпуса (рис. 4), что способствует более быстрому поиску эффективных путей улучшения гидродинамических качеств, что влияет на качество и быстроту выполнения работ. В результате удалось сократить время разработки теоретического чертежа до 20 календарных дней, по истечении которых были получены и переданы в распоряжение генерального проектанта форма корпуса с учетом ее гидродинамической оптимизации, согласованная конфигурация выступающих частей и элементов движительно-рулевого комплекса, расчетные данные о буксировочном сопротивлении судна в интересующем диапазоне скоростей и прогноз скорости хода. В дальнейшем эти данные были уточнены и использованы для прогнозных расчетов ходовых качеств судна в балласте и грузу.
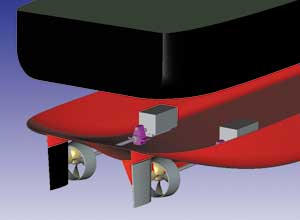

Рис. 5. Трехмерная модель компоновки движительно-рулевого комплекса (T- Flex CAD) и самоходная модель судна ограниченного плавания, выполненная ЦНИИ им. акад. А.Н.Крылова
На последующих этапах разработки проекта в большом опытном бассейне ЦНИИ им. акад. А.Н.Крылова под руководством проф. Г.И.Каневского были выполнены буксировочные и самоходные испытания модели судна с целью проверки проектных решений и определения ходовых качеств. На рис. 5 показаны трехмерная компьютерная модель компоновки пропульсивного комплекса, разработанная специалистами DMT с помощью T-Flex CAD, и фотографии самоходной модели.
Результаты модельных испытаний и численных расчетов буксировочного сопротивления
После завершения работ, связанных с проектированием ходовых качеств судна, весьма интересно было сопоставить результаты модельных испытаний и численных расчетов. Для основной гидродинамической характеристики корпуса — буксировочного сопротивления — сравнение приведено в таблице. В графе 1 таблицы указана скорость судна в узлах, в графе 2 — полное сопротивление судна по данным ЦНИИ им. акад. А.Н.Крылова, в графе 3 — сопротивление по данным DMT. Из таблицы видно, что различия в результатах весьма несущественные и не превышают погрешностей эксперимента в современных гидродинамических лабораториях, оборудованных крупными бассейнами.
Для прогнозирования ходовых качеств судов, помимо точного определения буксировочного сопротивления, необходимо также получить коэффициенты взаимодействия движителей и корпуса судна, спроектировать движители и получить их гидродинамические характеристики. Учет составляющих взаимодействия численными методами может быть осуществлен с помощью FlowVision путем совместного расчета обтекания корпуса потоком, обусловленным его буксировкой, и потоком, обусловленным работой движителя, который создается с помощью упрощенной (рис. 6а) или точной (рис. 6б) модели последнего. Такая методика очень близка к самоходным испытаниям «в жесткой запряжке». Засасывающая сила определяется при этом непосредственно как часть сопротивления судна. Применение методики сопровождается значительными сложностями постановки расчетов, но предоставляет подробную информацию о физических особенностях взаимодействия элементов пропульсивной системы, которая очень полезна для их оптимизации.
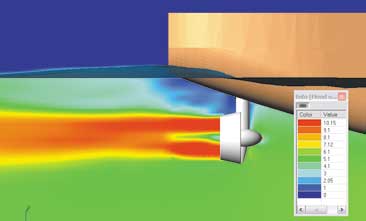
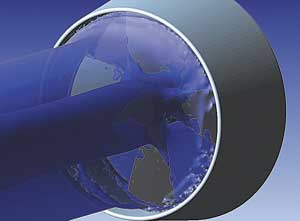
Рис. 6. Моделирование взаимодействия судовых движителей с корпусом судна численными методами: а — упрощенная модель ГВ в насадке; б — точная модель
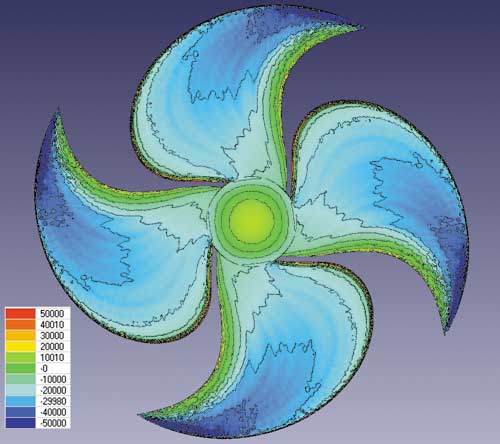
Рис. 7. Распределение давления по поверхности гребного винта M4-75 при относительной поступи 0,7 (FlowVision)
Рис. 8. Сопоставление кривых действия гребного винта M4-75, полученных путем расчета и эксперимента
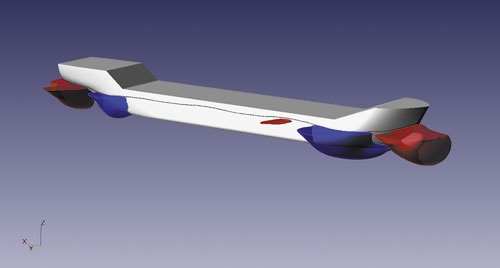
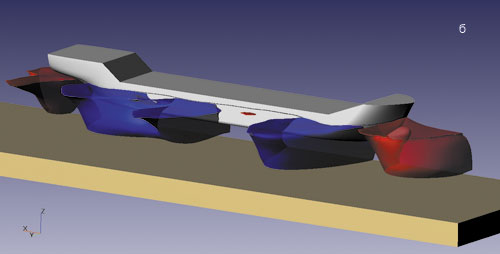
Рис. 9. Изоповерхность динамического давления 2500 Па (синим цветом показано отрицательное давление, красным — положительное): а — глубокая вода H/T = ∞; б — мелководье H/T = 2
Проектирование движителей, в частности судовых гребных винтов, также может быть осуществлено с помощью методов, аналогичных тем, что применяются в DMT для проектирования корпусов. Точность результатов определения гидродинамических характеристик подтверждается выполненными тестовыми расчетами. В качестве примера может служить расчет гребного винта серии M4-75, испытания которого были в свое время выполнены и тщательно выверены в кавитационных трубах ЦНИИ им. акад. А.Н.Крылова. Распределение давления по поверхности гребного винта, полученное по результатам расчета при относительной поступи 0,7, представлено на рис. 7. Сопоставление результатов расчетов FlowVision и эксперимента представлено на рис. 8, где построены безразмерные кривые действия гребного винта.
a
b
v
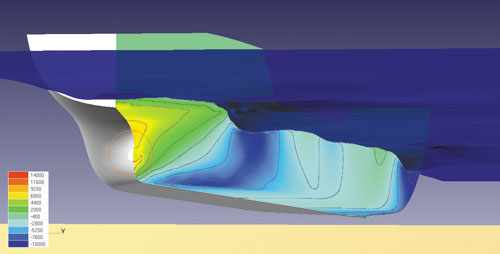
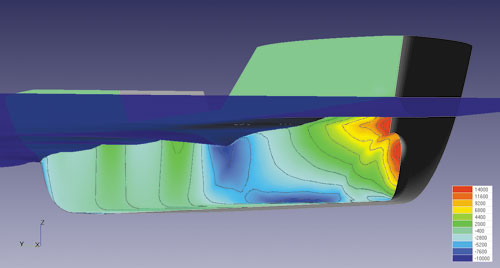
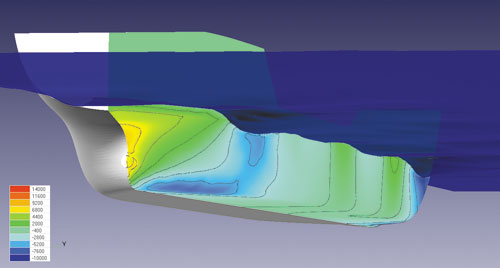
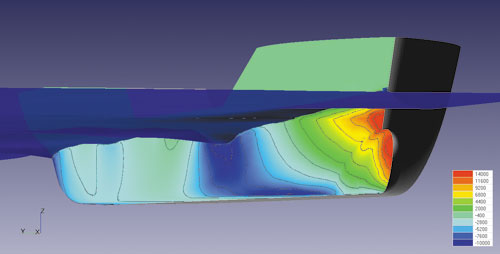
Рис. 10. Распределение динамического давления по корпусу судна: а, б — глубокая вода H/T = ∞; в, г — мелководье H/T = 2
Из приведенных примеров специалист по гидродинамике судна может сделать вывод, что при тщательно разработанной методологии основные задачи ходкости сегодня можно решать с помощью реализованных в мощном комплексе гидродинамического анализа численных методов, точность которых можно считать вполне удовлетворительной для практических целей. По мере развития численных методик и компьютерной техники, видимо, появится возможность решать и более сложные задачи, включающие нестационарные явления, что необходимо в практической гидродинамике судна. Метод решения одной из таких задач — моделирования движения судна на мелководье — разработан специалистами DMT, и уже получены результаты численных расчетов (рис. 9 и 10).
Борис Станков Директор компании Digital Marine Technology. Андрей Печенюк Руководитель отдела вычислительной гидродинамики судна компании Digital Marine Technology. |

