
Проектирование приводов вращения в среде APM WinMachine
Назначение APM Drive и его потенциальные возможности
Новые возможности модуля APM Drive
В этом году коллективом НТЦ АПМ проведена большая работа по улучшению функциональных возможностей модуля комплексного расчета и инженерного анализа приводов вращательного движения APM Drive. Она выполнялась по заказу одного из ведущих предприятий металлургического машиностроения нашей страны — акционерной холдинговой компании «Всероссийский научно-исследовательский и проектно-конструкторский институт металлургического машиностроения им. ак. Целикова» (АХК «ВНИИметмаш») — при непосредственном участии представителей предприятия в части постановки задач и тестирования разработанных программных продуктов. В результате новая редакция модуля APM Drive включена в состав версии 9.2 системы APM WinMachine.
Прежде чем перейти к описанию новых функциональных особенностей модуля APM Drive, необходимо напомнить основные положения, определяющие его возможности в целом.
Назначение APM Drive и его потенциальные возможности
Как известно, привод устанавливается в кинематической цепи между двигателем и исполнительным механизмом с целью получения необходимых для исполнительного механизма кинематических и энергетических параметров.
Под кинематическими понимаются параметры скорости элементов цепи и их передаточные отношения, а под энергетическими — моменты, мощности, КПД и т.п. Сразу отметим, что по многочисленным просьбам наших пользователей в версии 9.2 предусмотрена дополнительная визуализация результатов расчета мощностей на валах, что позволяет сразу же перейти к подбору электродвигателя из базы.
Для того чтобы обеспечить требуемые механические характеристики, необходимо спроектировать индивидуальный передаточный механизм. В автоматическом режиме эту работу позволяет выполнить модуль APM Drive. Если формулировать более точно, то APM Drive предназначен для расчета и проектирования приводов вращательного движения произвольной структуры и выпуска текстовой документации, а также чертежной документации в виде сборочных и деталировочных чертежей.
Необходимые для проектирования приводы задаются в виде кинематической цепи, которая может быть составлена из произвольного набора передач, валов и подшипников качения. Для задания кинематической цепи в APM Drive предусмотрен специализированный редактор, в котором в интерактивном режиме можно задать состав цепи и направление передачи момента (рис. 1). В редакторе имеется специальная процедура, с помощью которой можно выполнить для заданной схемы автоматическое разбиение передаточного отношения по ступеням, позволяющее спроектировать привод наименьшей массы. Однако при желании эта операция реализуется и в ручном режиме.
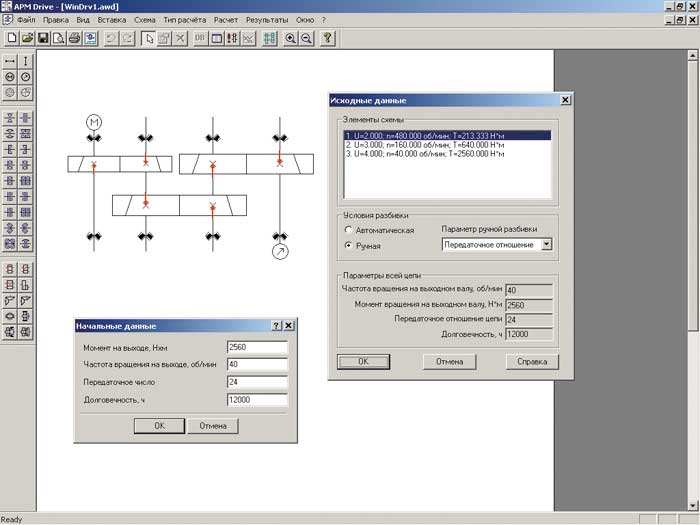
Рис. 1. Задание параметров в APM Drive
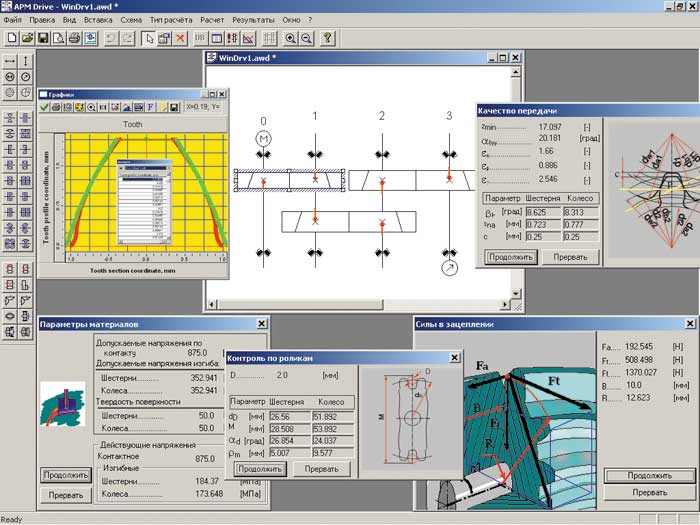
Рис. 2. Расчет и проектирование передач вращения в модуле APM Trans
Следствием такого комплексного подхода к проектированию привода является включение в состав программной среды не только модуля APM Drive, но и других программных продуктов из линейки APM WinMachine. Сегодня для обеспечения эффективной работы модуля расчета и проектирования приводов необходимо использовать:
• модуль расчета и проектирования передач вращения APM Trans (рис. 2);
• модуль расчета и проектирования валов и осей APM Shaft (рис. 3);
• модуль расчета и подбора подшипников качения APM Bear (рис. 4);
• графический редактор APM Graph;
• базу данных APM Base с набором библиотек.
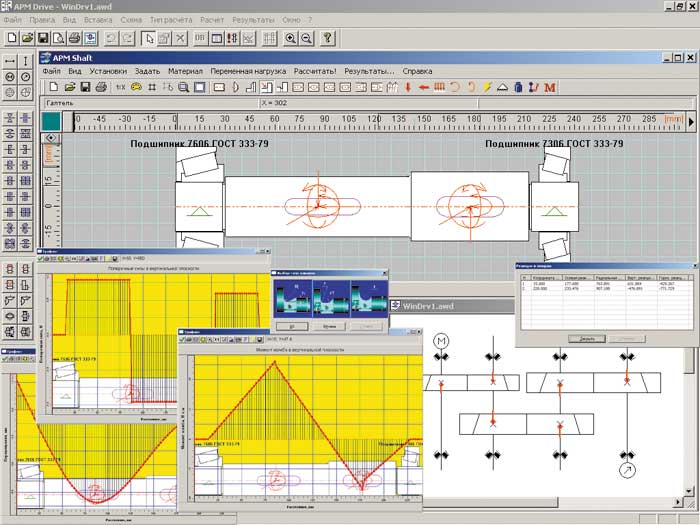
Рис. 3. Модуль расчета и проектирования валов и осей APM Shaft
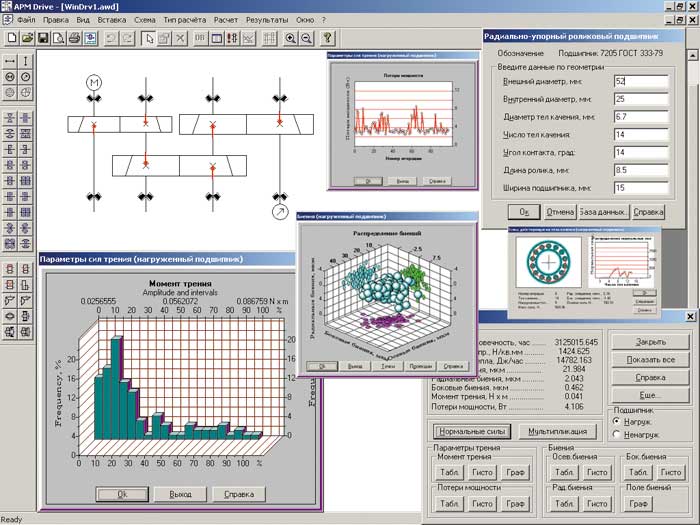
Рис. 4. Расчет и подбор подшипников качения в модуле APM Bear
Это означает, что все функциональные возможности вышеперечисленных программных продуктов могут быть востребованы при использовании APM Drive.
Редактор APM Drive — это своего рода конструктор, из элементов которого можно составить произвольную совокупность элементов кинематической цепи. Перечислим эти элементы.
Передаточные механизмы:
• цилиндрические наружного и внутреннего зацепления (прямозубые, косозубые и шевронные);
• конические с прямыми и круговыми зубьями трех известных форм, применяемых в машиностроении;
• червячные;
• ременные и цепные.
Установка подшипников при создании кинематических схем может быть выполнена с использованием следующих типов подшипников качения:
• шариковые радиальные однорядные и двухрядные сферические самоустанавливающиеся;
• шариковые радиально-упорные;
• шариковые упорные однорядные и многорядные;
• роликовые радиальные однорядные и двухрядные сферические и игольчатые;
• роликовые радиально-упорные конические;
• роликовые упорные.
Что касается валов, то в рассматриваемой среде можно спроектировать прямолинейные (гладкие или ступенчатые), сплошные и полые валы.
Модуль APM Drive позволяет выполнить расчет планетарных передач следующих типов:
• планетарные с одним внутренним зацеплением;
• планетарные с внутренним и внешним зацеплениями;
• с двумя внешними зацеплениями;
• с двумя внутренними зацеплениями.
Говоря о методах расчета, необходимо отметить, что для зубчатых передач выполняется геометрический расчет, а также расчет прочности по контактным напряжениям и напряжениям изгиба. Валы рассчитываются на статическую и усталостную прочность, кроме того, исследуется их жесткость и динамика.
Подшипники подбираются из базы данных, при этом выбирается наименьший по требуемой долговечности подшипник.
Для зубчатых передач выполняется также расчет точности, под которым понимают выбор чисел допусков геометрических размеров в зависимости от класса точности. Классы точности определяются по скорости либо задаются разработчиком в зависимости от назначения проекта.
Новые возможности модуля APM Drive
В ранних версиях APM Drive выполнить проверочный расчет кинематической цепи было невозможно — все ограничивалось исключительно проектировочным расчетом, под которым подразумевается определение требуемых геометрических размеров по заданным выходным параметрам: моменту, оборотам, долговечности, материалам и их термообработке.
Проверочный расчет — это такой вид расчета передачи, при котором по известной геометрии зубчатых передач определяется либо величина передаваемого момента, либо долговечность работы передачи.
В выходящей версии APM Drive проверочный расчет также оказывается доступным.
Новые возможности появились и при выборе направления линии зуба. Цилиндрические передачи с косым зубом могут быть левого и правого направлений. От выбора этого направления зависит и направление действующей на вал осевой нагрузки, и направление момента изгиба вала. Ранее это направление задавалось жестко, и для каких-либо изменений необходимо было вносить коррективы в редакторе расчета валов. Сейчас это можно будет сделать автоматически на начальном этапе выбором соответствующего направления зуба. Кроме того, для корректного определения направления зуба предусмотрена функция, которая позволяет менять направление вращения вала двигателя. Теперь имеется возможность задавать направление вращение вала: по часовой либо против часовой стрелки. Все это в совокупности позволяет однозначно определить направление и величины сил в зацеплениях, которые влияют на прочность, жесткость и иные параметры элементов передачи.
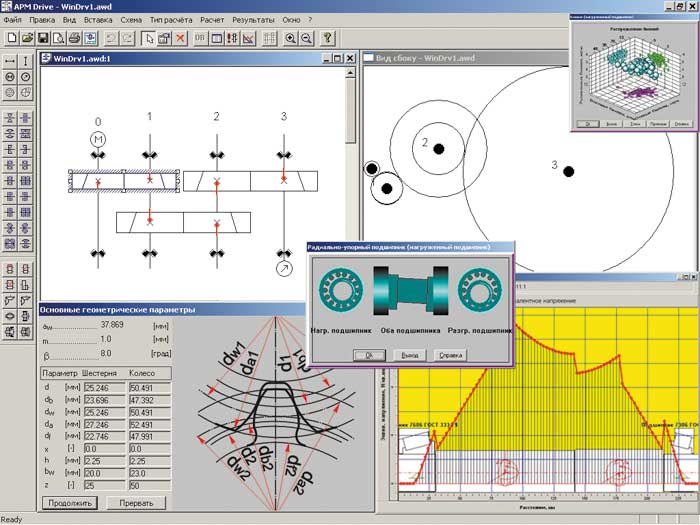
Рис. 5. Пространственное размещение валов в APM Drive
Одним из наиболее значимых изменений является возможность пространственного размещения валов (рис. 5). В предыдущих версиях размещение элементов передач на валу можно было выполнить только в одной плоскости, чего вполне достаточно при проектировании, например, обыкновенного редуктора. Однако для более сложных случаев требуется размещение валов в различных плоскостях. Примером таких конструктивных решений может стать привод прокатного стана или, например, привод станка. Можно привести также другие, довольно многочисленные примеры, когда исполнительные и приводные механизмы находятся в одном корпусе. В таком случае приводные элементы более рационально располагать пространственно.
Для реализации этих возможностей модуль APM Drive оснащен редактором, который позволяет выполнить боковую проекцию кинематической цепи. Реализовано также перемещение зубчатых колес с сохранением возможного зацепления.
В версии 9.2 предусмотрена возможность прорисовки в эскизе не только конфигурации вала, но и сопряженных с ним деталей, таких как подшипники качения, зубчатые колеса и шестерни. Сделано это для более удобного контроля за осевым положением сопряженных деталей. Если автоматическая генерация осевого положения окажется неудовлетворительной, то с помощью имеющихся программных инструментов можно выполнить необходимые перемещения любых деталей, размещенных на поверхности вала.
Наконец, в версии 9.2 существенно повышена точность вычисления геометрических размеров.
Заключение
Описанный программный продукт адресован конструктору-машиностроителю, занятому разработкой новых машин и механизмов, и окажется ему крайне полезным при конструировании привода вращательного движения.
APM Drive является уникальным программным продуктом, так как других программ с подобной функциональностью на рынке не предлагается. Созданные с его помощью приводы будут оптимальными по весовым параметрам, поскольку они рационально спроектированы по совокупности зубчатых зацеплений, валов и подшипников. Можно утверждать, что сконструированные с помощью APM Drive приводные механизмы будут соответствовать лучшим мировым образцам.
Еще раз отметим, что разработка программного продукта выполнялась при непосредственном участии сотрудников АХК «ВНИИметмаш», которые выполнили комплексную проверку результатов расчета и тестирование функциональных возможностей версии 9.2 модуля APM Drive. Пользуясь случаем, хотим поблагодарить всех, кто принимал участие в этой работе!

