Новый аспект в разработке автоматизированных систем на примере расчета деревянных конструкций на МЗП

Мария Павленко
Аспирант, Санкт-Петербургский государственный архитектурно-строительный университет
Современные реалии строительной отрасли таковы, что для расчета конструкций сегодня применяются автоматизированные системы расчета. Зачастую на освоение подобных программных пакетов требуется несколько недель или даже месяцев. Как правило, для обучения необходимо привлекать компетентных специалистов, поскольку интерфейс этих ПО труден для понимания, существуют неочевидные возможности программы, а выходные данные получить можно самым примитивным и неэффективным способом. Вследствие этого при самостоятельном освоении таких программ много времени тратится на изучение возможностей продукта, а не на процесс проектирования.
В случае выполнения проекта неопытным специалистом требуется постоянный контроль над ходом работы. Выявлять неточности проектирования существующие программные средства умеют, но предложить решение возникших проблем они не способны.
В нынешних условиях особенно остро стоит вопрос об улучшении подобных систем, упрощении их практического применения, а также интенсификации промышленного производства с их эксплуатацией. Для сокращения времени адаптации специалиста к программе, увеличения его производительности и решения поставленных задач предлагается совершенно иной подход к разработке программного обеспечения (ПО), основанный на следующих положениях:
- разделение процесса проектирования на шаги и последовательное их выполнение;
- контроль ошибок ввода информации и быстрая подсказка по их редактированию;
- внедрение новых компонентов интерактивной помощи;
- динамическая визуализация графических элементов в зависимости от введенных параметров;
- расширенный интерактивный режим взаимодействия;
- выполнение графической документации (рабочих чертежей на 60%);
- поддержка нормативносправочной информации по предмету проектирования;
- просмотр «Истории расчета» с анализом проведенных сеансов расчета;
- наличие элементов экспертной системы.
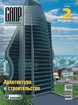
В качестве практической задачи использования указанного подхода предлагается проектирование деревянных ферм на металлических зубчатых пластинах (МЗП) — рис. 1. МЗП нашли применение в жилищном домостроении как один из видов соединения элементов. В зарубежной практике эти соединения уже давно активно используются в Финляндии, Швейцарии, США и Канаде.
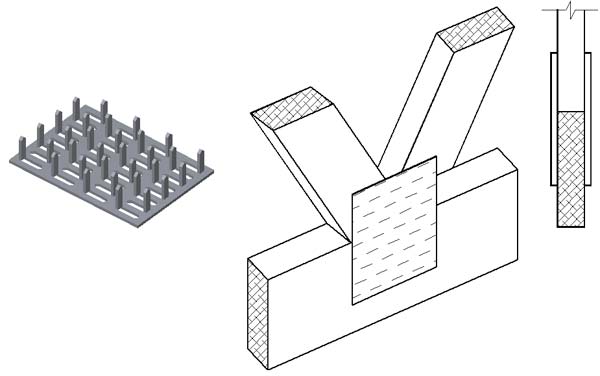
Рис. 1. Металлическая зубчатая пластина, соединение на МЗП
В основе расчета МЗП лежит определение рабочих площадей пластины для каждого элемента. Рабочей площадью называется площадь пластины на элементе без краевых полос шириной 10 мм (рис. 2). Выполнять такой расчет «вручную» неэффективно ввиду большого количества узлов. Как правило, это приводит к излишним запасам прочности и неоправданной унификации узлов.
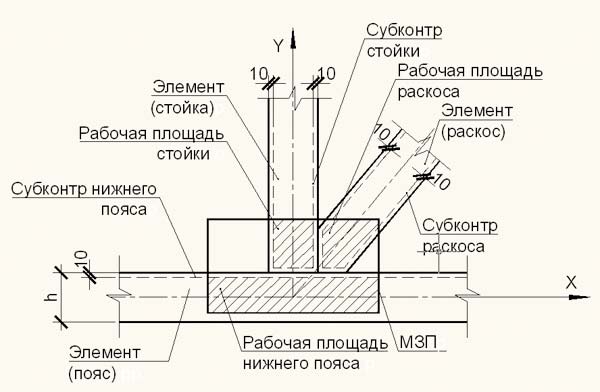
Рис. 2. Рабочая площадь МЗП
Среди существующих разработок по расчету ферм на МЗП известны Mitek и APM Wood. Принципы расчета в этих программах закрыты, и рядовому проектировщику трудно найти грамотное решение — а это снижает эффективность применения продуктов. Кроме того, в упомянутом ПО рассматриваются узлы только с одной пластиной, ориентированной не всегда рационально. Но из опыта известно, что в узле можно установить несколько пластин, которые при необходимости могут быть повернуты (рис. 3). Таким способом можно добиться снижения расхода пластин примерно вдвое.
Рис. 3. Способы размещения пластин в узле
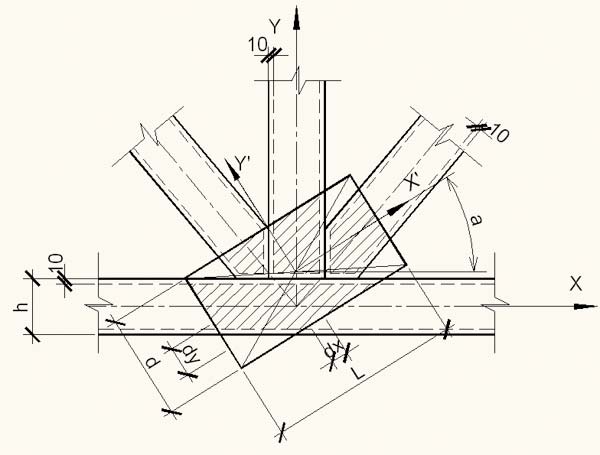
Рис. 4. Основные параметры пластины
Для решения указанных проблем определения рабочих площадей МЗП и оптимизации расстановки МЗП в узле создана автоматизированная система «УИИК.Ферма» для проектирования деревянных ферм на МЗП, которая базируется на предложенном подходе к проектированию такого рода систем.
Программа носит обучающий характер. Для помощи в проектировании и обучении разработаны компоненты, отвечающие этим задачам, — окно динамических подсказок, бегущая строка сообщений, поле числового ввода и др.
В окне динамических подсказок даются пояснения по каждому параметру. Появление таких подсказок осуществляется наведением мыши на необходимый компонент. Бегущая строка динамических сообщений — еще один новый направляющий компонент, который отображает мягкие и жесткие запреты. Рекомендации к корректному расчету — мягкие запреты — выдаются зеленым цветом, а критические ситуации (например, выход МЗП за кромку фермы) — жесткие запреты — красным.
Система таких запретов склоняет человека к пассивному запоминанию ценной информации путем многократного ее повторения. В этом состоит предпосылка к обучению пользователя конструированию и расчету.
Для помощи, касающейся проблемной части, в развернутом виде сформирована внутренняя программапомощник, содержащая справочные и методические материалы, карты и нормативные документы, а также и атлас строительных конструкций. Эта система позволяет получить необходимый материал в нужный момент.
В программе используется интерактивный способ взаимодействия объектов по технологии WYSIWYG (What You See Is What You Get), подразумевающий мгновенное отображение изменений при вводе новых параметров.
Сильной стороной «УИИК.Ферма» является и интуитивнопонятный интерфейс, что позволяет легко разобраться в стандартных обозначениях без дополнительной помощи.
Для решения задачи определения рабочих площадей МЗП разработана библиотека численных методов работы с полигонами, полуплоскостями и точками, а также создан детерминированный алгоритм определения рабочих площадей. Ставится задача параметрической оптимизации — определения наиболее подходящих параметров пластины, которые задаются так:
X = {pl =< d,l,α,dx,dy > |0 £ d,l £ 100,0 £ α £ 2π,–50 £ dx,dy £ 50,Аpl ³ 50},
где d — ширина пластины, см; l — длина пластины, см; α — угол поворота пластины, рад; dx — смещение центра пластины по оси OX, см; dy — смещение центра пластины по оси OY, см;
Apl = = Σe Area(Poly(pl) Ç Poly10 (e)) — рабочая площадь МЗП (рис. 4).
В качестве исходного полигона используется полигон пластины — АВСD:
X = {pl =< d,l,a,dx,dy >} (рис. 5).
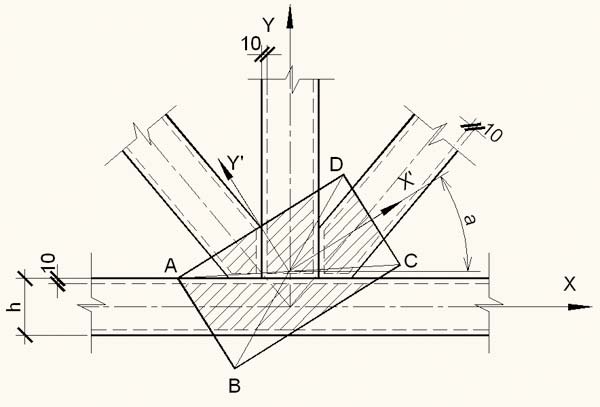
Рис. 5. Исходный полигон МЗП
Для нахождения рабочей площади одного элемента в узловом соединении полигон раскоса X1 уменьшается на полосу шириной 10 мм, параллельную грани стержня:
X10 = X1 Ç Poly10 (e)
От полигона Х отсекаются полуплоскости, проходящие через границы полигона Х10:
Xe = X Ç Pab Ç Pcd Ç Pde Ç Pea,
где Pab, Pcd , Pde, Pea — полуплоскости со сторонами ab, cd, de, ea соответственно (рис. 6).
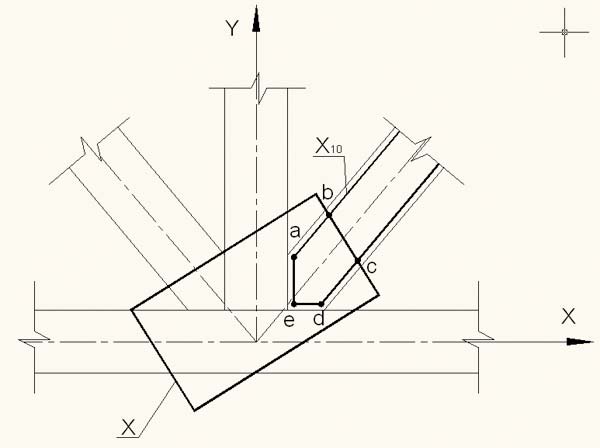
Рис. 6. Пересечение полигонов
Разбивая получившийся полигон Хе на треугольники, вычисляется его площадь по формуле Герона, которая и является искомой рабочей площадью МЗП:
Apl = Σe Area(X'e)
С помощью описанного алгоритма в программе можно моделировать любые узлы на МЗП (рис. 7).
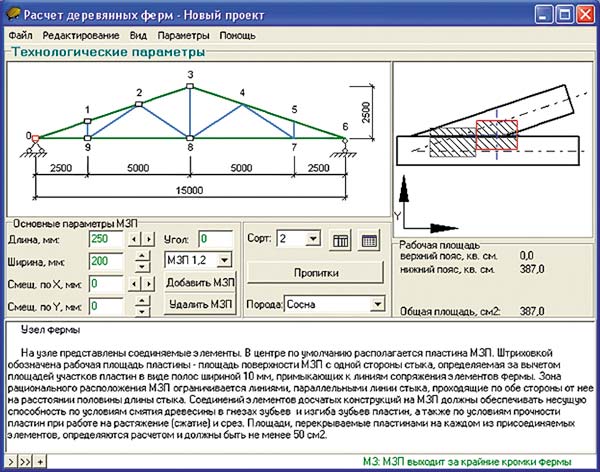
Рис. 7. Модуль «Технологические параметры»
Программа позволяет проводить расчет нескольких ферм одновременно, а затем сравнить полученные результаты. Предназначен продукт для переквалификации кадров, для студентов очной, заочной или дистанционной формы обучения, для исследования конструкций, а также для реального проектирования. Проектировщик имеет свободу выбора нюансов проектного и конструктивного решений, возможность анализа своих ошибок, корректировки промежуточных и конечных результатов и сравнения их с передовыми и современными решениями. С его помощью можно провести автоматизированный расчет ферм на МЗП, оптимизировать расстановку пластин в узле, а также помочь начинающим специалистам освоить тонкости проектирования, повысить качество и точность проектной документации.

