
Михаил Гусев,
научный сотрудник, Сколтех
Команда студентов Сколтеха применила pSeven для интеграции инструментов системного моделирования и инженерного анализа с целью оптимизации характеристик беспилотного летательного аппарата.
В данном проекте группа студентов Сколтеха оптимизировала конструктивные параметры и динамику полета запускаемого из трубчатой направляющей беспилотного летательного аппарата (БПЛА) с помощью pSeven. В исходном положении БПЛА находится внутри направляющей со сложенными крыльями. Во время запуска давление внутри трубы растет и придает ускорение беспилотнику. После вылета из трубы крылья раскрываются, и летательный аппарат начинает набирать высоту.

Рис. 1. Трубчатая направляющая БПЛА
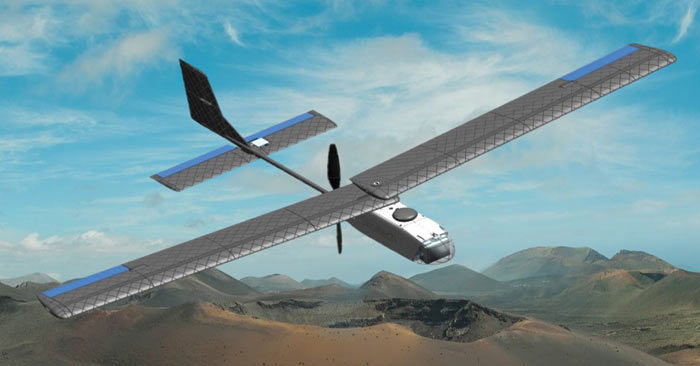
Поведение беспилотника в воздухе зависит от конструкции отдельных его компонентов. Поэтому требуется многодисциплинарная оптимизация, в ходе которой виртуальное представление изделия анализируется на разных уровнях — от одномерных моделей, описывающих общее поведение системы, до трехмерных СAD и CAEмоделей, отображающих проектные параметры, конструктивную целостность и надежность (рис. 1 и 2).
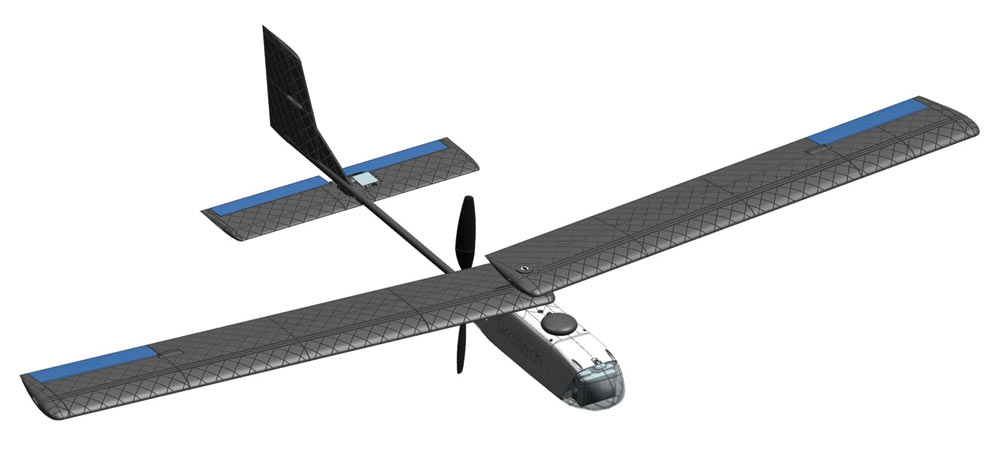
Рис. 2. Геометрическая модель БПЛА с расправленными крыльями
О Сколтехе
Сколковский институт науки и технологий (Сколтех) — негосударственный образовательноисследовательский институт, который находится в Сколково (Россия, Московская область). Созданный в 2011 году при участии Массачусетского технологического института (MIT), Сколтех готовит новые поколения исследователей и предпринимателей, продвигает научные знания и содействует технологическим инновациям с целью решения важнейших проблем, стоящих перед Россией и миром. Институт строит свою работу, опираясь на лучшие традиции российских и международных образовательных и исследовательских практик, делая особый акцент на предпринимательской и инновационной деятельности (www.skoltech.ru).

О компании DATADVANCE
DATADVANCE является ведущим в России разработчиком программного обеспечения в области интеллектуального анализа данных, предсказательного моделирования и многодисциплинарной оптимизации. Миссия компании — создание и совершенствование эффективного и удобного программного инструментария, позволяющего клиентам существенно сократить временные и финансовые затраты на создание инновационных продуктов и повысить их качество и технические характеристики (www.datadvance.net).

Цель
В задаче требовалось определить такие конструктивные параметры крыла (рис. 3), которые позволили бы минимизировать напряжение и обеспечили бы наилучшую динамику полета. Рассматривались следующие входные параметры:
- толщина каждой нервюры крыла — ti;
- длина крыла — l;
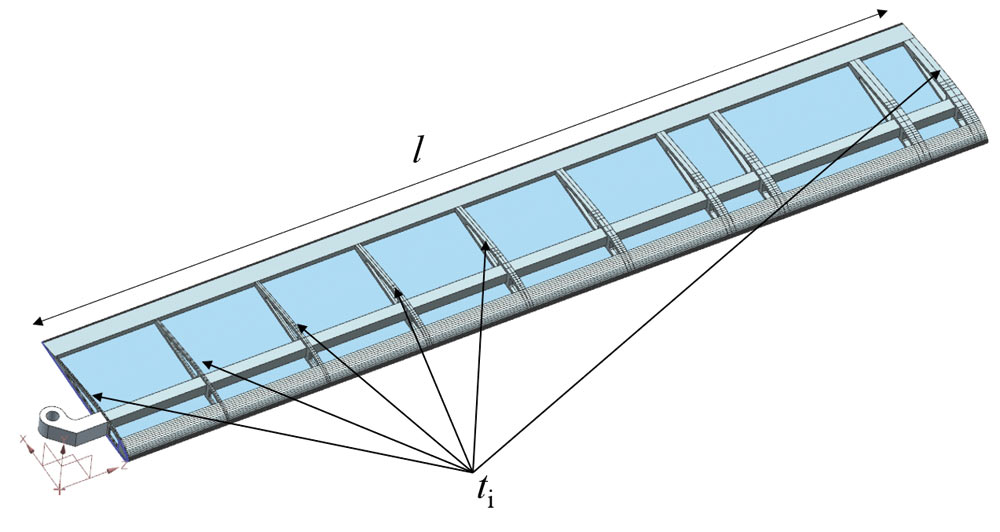
Рис. 3. Конструктивные параметры крыла беспилотника
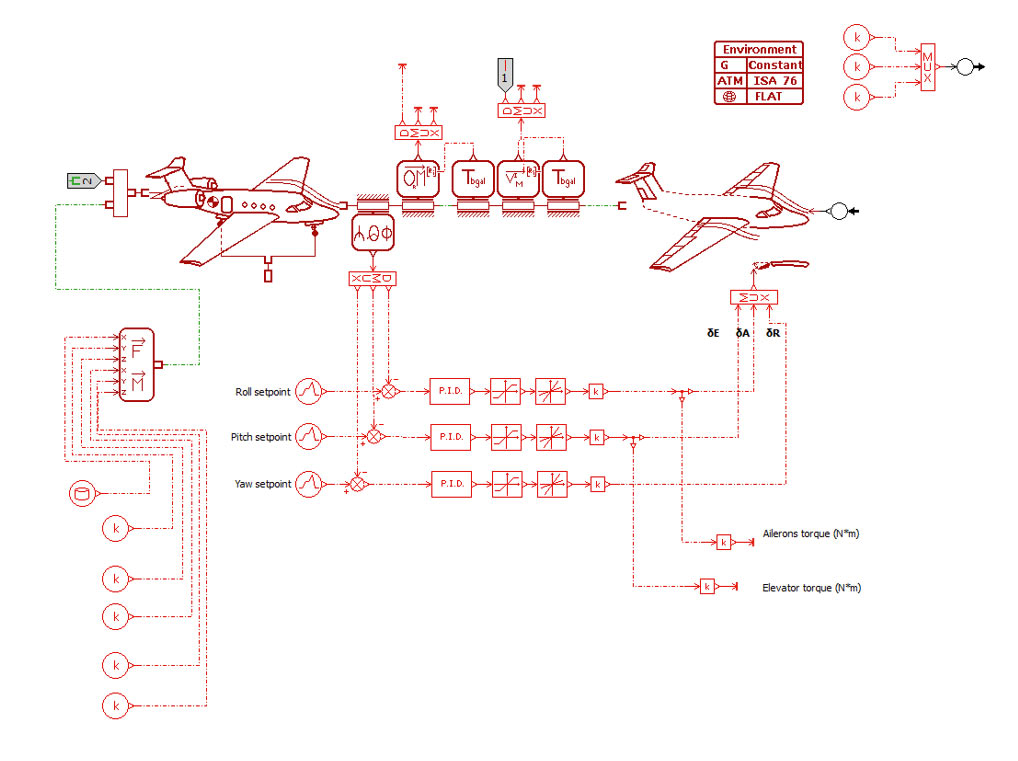
Рис. 4. Модель динамики полета БПЛА в Amesim
Расчет зависимости динамики полета от длины крыла, общей массы, центра масс и других характеристик БПЛА был произведен в Amesim (рис. 4). Аэродинамические нагрузки для различных длин крыла были получены в ходе CFDанализа в ANSYS CFX, где БПЛА моделировался целиком (рис. 5).
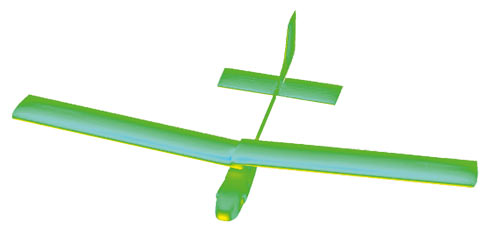
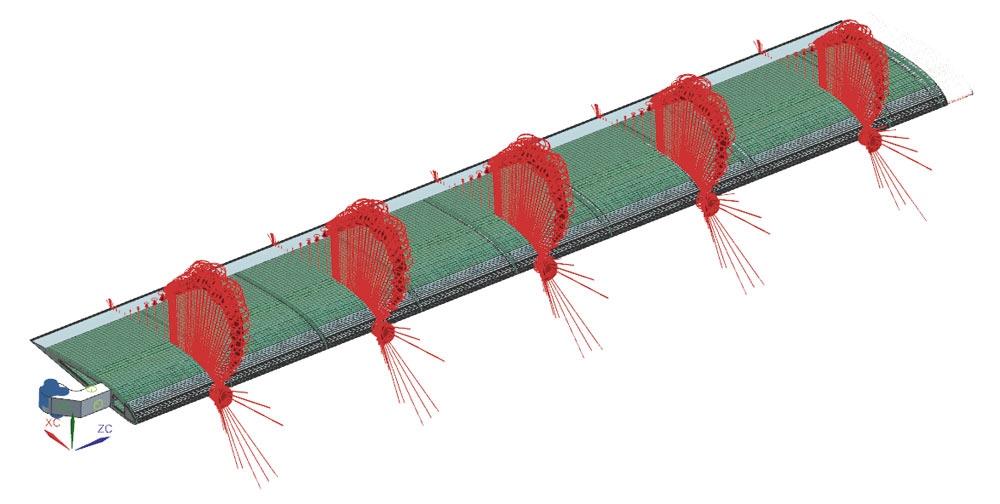
Рис. 5. Газодинамическая модель БПЛА,
демонстрирующая распределение нагрузок на крыло
Полученные нагрузки использовались в прочностном анализе в Simcenter 3D (NX Nastran) для расчета напряжений в крыле. Согласно его результатам, области максимального напряжения находятся ближе к корневой части лонжерона (рис. 6).
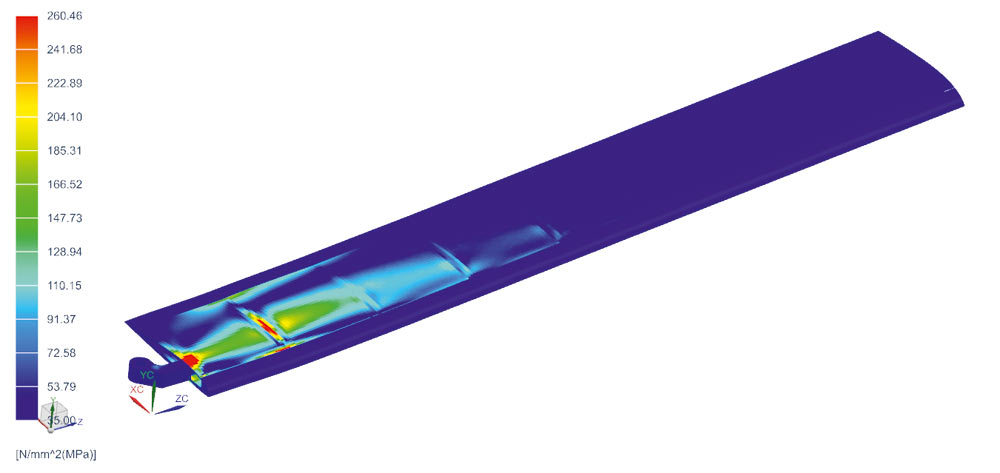
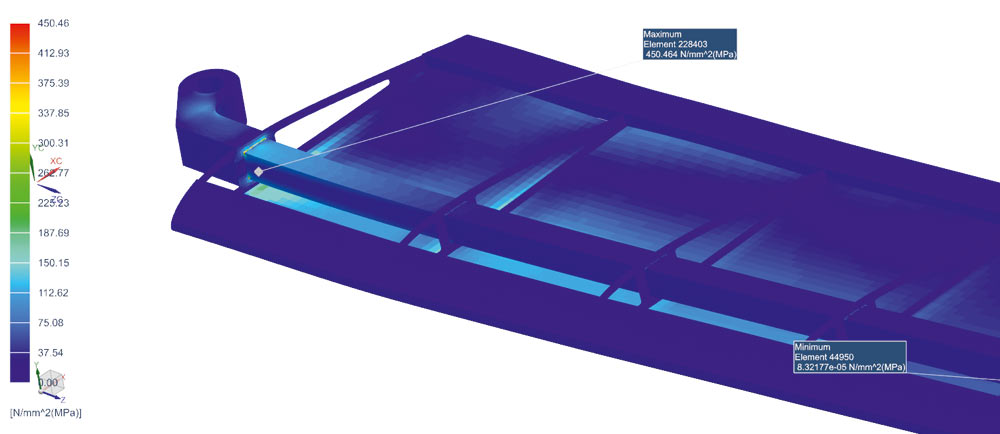
Рис. 6. Напряжения по Мизесу в крыле БПЛА
Трудности
- Многодисциплинарность: расчет нагрузок на крыло, напряжений, динамики полета;
- длительность газодинамических и прочностных расчетов;
- неэффективность алгоритмов оптимизации, имеющихся в Amesim.
Решение
Поскольку каждый запуск прочностного расчета длился порядка 7 мин, то вместо его интеграции в итоговую расчетную схему оптимизации было проведено планирование эксперимента (DoE) в pSeven. Полученные значения прочностных параметров, напряжений в крыле и массы БПЛА использовались для обучения аппроксимационной модели.
Платформа pSeven позволила объединить эту модель и расчеты динамики полета в Amesim в единую расчетную схему, запускающую процесс оптимизации. На рис. 7 показана итоговая схема оптимизации.
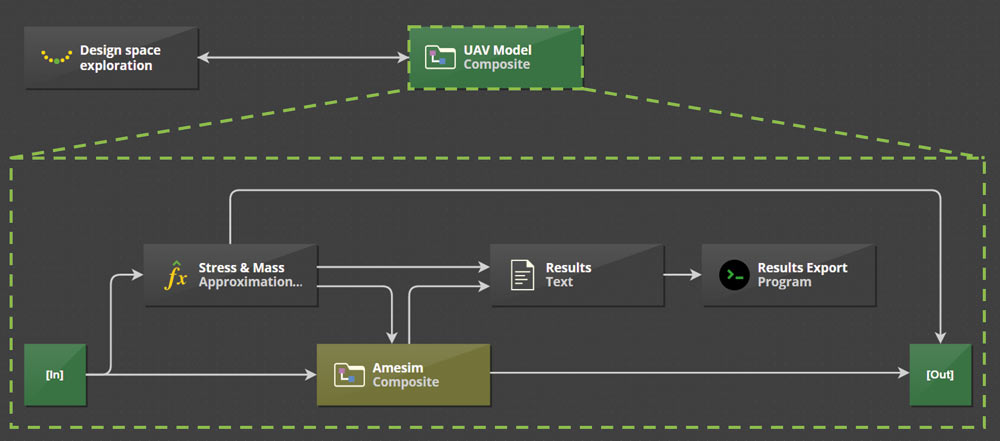
Рис. 7. Cхема оптимизации БПЛА в pSeven
Цели оптимизации:
- минимизировать напряжения в крыле;
- увеличить высоту полета БПЛА.
Напряжения в крыле исследовались с помощью аппроксимационной модели, а высота полета была рассчитана по модели динамики полета в Amesim.
Результаты
Результаты оптимизации:
- значения напряжений в крыле уменьшены на 14% по сравнению с исходными;
- найдена оптимальная геометрия крыла.
Данные процесса оптимизации приведены на рис. 8 и 9.
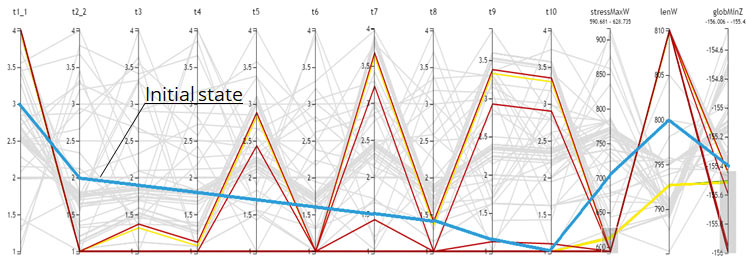
Рис. 8. Данные оптимизации в виде графика параллельных координат
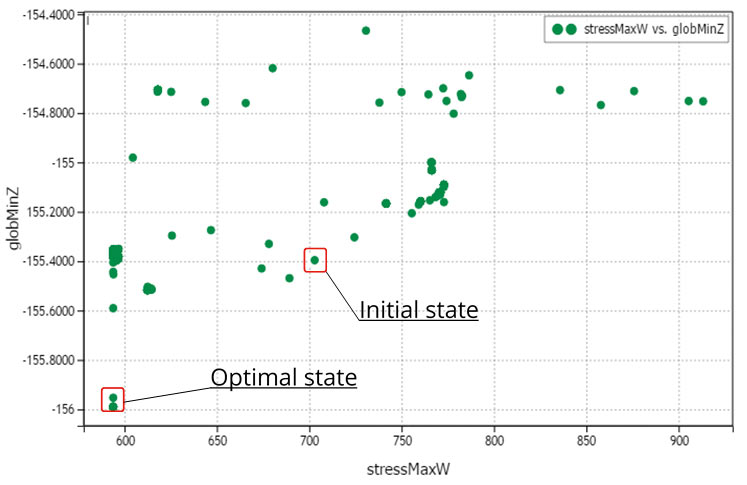
Рис. 9. Целевые функции оптимизации: высота полета и напряжения в крыле

