
Понижение порядка модели для увеличения скорости расчета применительно к интегрированной модели летных характеристик регионального турбовинтового самолета.
Мотивация
Занимаясь системным моделированием, во время расчета пользователь в определенный момент сталкивается с неудовлетворительной производительностью имитационных моделей. Изза междисциплинарного и неоднозначного характера моделирования систем не всегда просто понять, как улучшить время расчета моделей. Иногда это может вызвать недоумение. В этой статье будет предпринята попытка объяснить, каковы наиболее распространенные причины медленного расчета и как использовать модель пониженного порядка для его ускорения.
Модель пониженного порядка (ROM — Reduced Order Models) — это модель, полученная в результате упрощения высокоточной статической или динамической модели, но сохраняющая ее важнейшие поведенческие черты и основные (доминирующие) эффекты, обеспечивая при этом сокращение затрат времени на решение задачи или емкости хранилища информации (рис. 1).

Рис. 1. Три типа преимуществ использования ROM-моделей
Анализ первопричин
Обычно невысокая производительность во время расчета наблюдается по двум основным причинам:
1 Модель не подходит для имитационного анализа. Чтобы понять смысл этого утверждения, следует вспомнить, что модели — это абстрактные представления реальных систем. Они не являются точными представлениями, а следовательно, не обеспечивают полностью репрезентативных результатов. Однако цель (и задача) моделирования — включить соответствующие представления, необходимые для предполагаемого назначения модели. Логично, что если модель излишне детализирована для анализа, то время ее расчета может оказаться слишком большим. Если это так, необходимо пересмотреть и адаптировать модель к проводимому анализу.
2 Если же модель концептуально адекватна, то достичь компромисса между точностью и эффективностью выполнения мешает недостаточность вычислительных ресурсов. Это особенно актуально для приложений реального времени, где требуется, чтобы расчет выполнялся с фиксированным временным шагом. В этом случае методы модели пониженного порядка (ROM) могут быть полезны для упрощения этих моделей с сохранением их поведенческих свойств и доминирующих эффектов с целью сокращения времени расчета.
В данной статье рассказывается о применении методов ROM, а именно о «ручном» сокращении (модели на основе физических явлений) и о нейронных сетях (глубокое машинное обучение), позволяющих сократить время расчета работы газовой турбины и ее интеграции в модель летных характеристик.
Практическое применение моделей пониженного порядка
Последний релиз Simcenter Amesim (v2020.2) включает два новых демонстратора регионального транспортного самолета и его гибридизацию для анализа летных характеристик. Как показано на рис. 2, они доступны в разделе «Aerospace and Defense» в категории «Integrated systems».
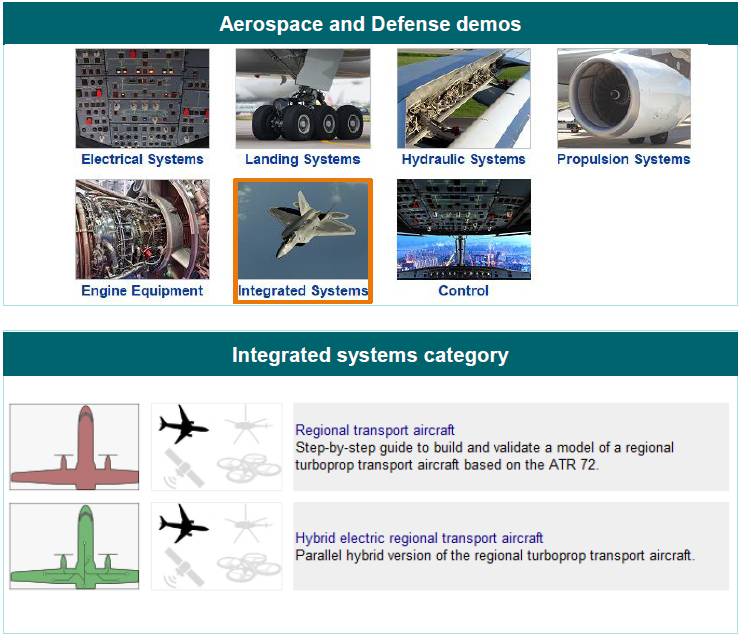
Рис. 2. Два новых демопримера регионального транспортного самолета в Simcenter Amesim v2020.2
Модель регионального самолета состоит из четырех частей: динамика полета, система управления, профиль полета и силовая установка.
Из статистики расчета видно, что расчет модели летных характеристик занимает около минуты, позволяя смоделировать миссию продолжительностью около полутора часов. Для этого был использован обычный ноутбук с 64битным компилятором GCC и переменным шагом интегрирования по времени (стандартный интегратор Simcenter Amesim).
Несмотря на то что на самом деле это хорошее время расчета для единичного случая, попробуем улучшить его, особенно если модель должна имитировать летные характеристики самолета в сотнях точек всего диапазона полета.
Хорошей отправной точкой является просмотр содержимого инструмента Performance Analyzer (рис. 3). Он предоставляет сводную информацию о том, какие переменные состояния контролировали временной шаг интегрирования. В нем ясно указано, что основной вклад принадлежит силовой установке, в частности модели турбовинтовой установки.
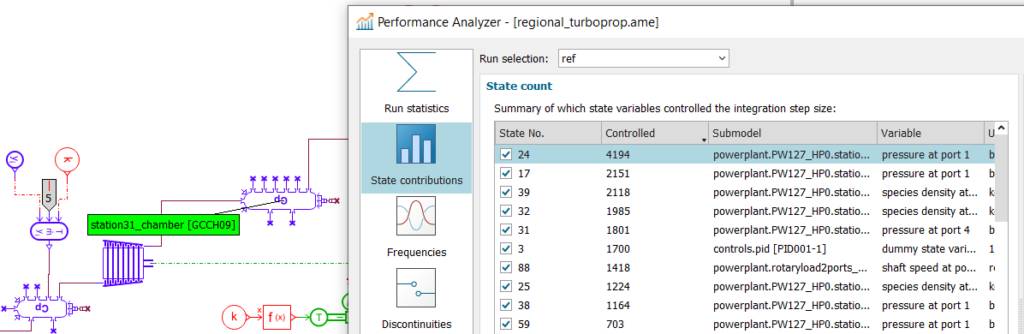
Рис. 3. Сводная информация, предоставляемая инструментом Performance Analyzer
Для ее создания мы использовали инструмент Gas turbine performance tool. Начиная с параметров, описывающих термодинамический цикл двигателя для заданной проектной точки, инструмент автоматически генерирует модель Simcenter Amesim с применением компонентов библиотеки Gas Turbine. Вы можете запустить инструмент, щелкнув в главном меню App Space приложения, как показано на рис. 4.
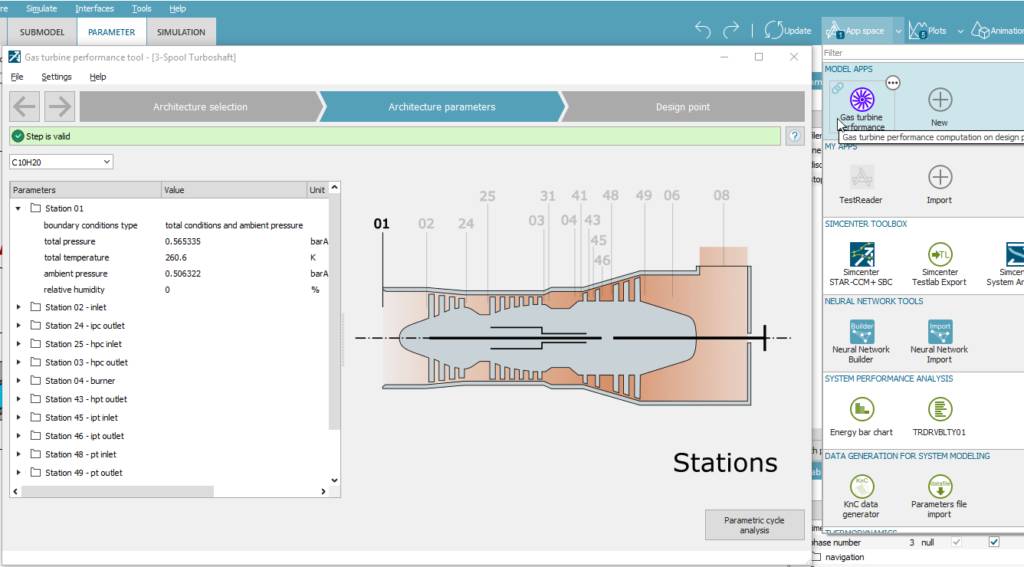
Рис. 4. Инструмент Gas turbine performance tool. Выбрана конфигурация турбовинтового двигателя с тремя ступенями
Как говорилось ранее, созданная таким образом модель является основным потребителем ресурсов ЦП (центральный процессор). По этой причине рабочие характеристики модели турбовинтового двигателя (далее — базовая модель) будут рассмотрены отдельно от интегрированной модели летных характеристик. Затем, с целью улучшения последних, мы применим методы ROM.
На рис. 5 изображена базовая модель, а на рис. 6 — график основных результатов. График на рис. 6а показывает температуру на входе в турбину (TET — turbine entry temperature). Мы совмещаем ее с профилем полета (высотой), чтобы помочь понять его эволюцию во время миссии. График на рис. 6б демонстрирует мощность на валу турбовинтового двигателя вместе с профилем высоты. Контроллер двигателя поддерживает постоянную мощность на каждой фазе полета. На графике 6в приведен расход топлива на двигателе. Наконец, график на рис. 6г отображает время процессора в логарифмической шкале.
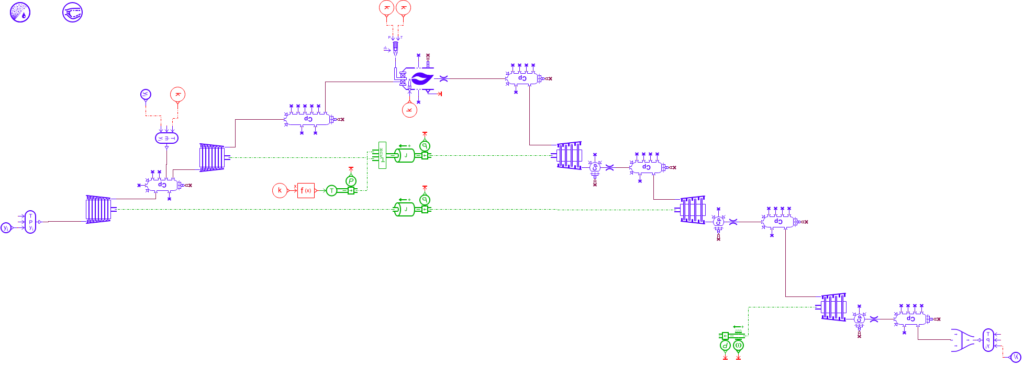
Рис. 5. Базовая модель турбовинтового двигателя с тремя турбинами
Понижение порядка на основе анализа физических явлений
Первая стратегия сокращения времени расчета состоит в «ручном» удалении высокочастотной составляющей расчета и снижении точности модели с сохранением разумной погрешности относительно исходных результатов.
Итак, были выполнены следующие шаги:
1 Вместо использования компонента свойств газа на основе данных NASA, для определения смеси был выбран линейный вариант. Этот вариант требует одной таблицы и более простых уравнений для описания характеристики свойств смеси, в отличие от варианта NASA. Следовательно, для вычисления свойств смеси на каждом временном шаге требуется меньше вычислительной мощности. Такая замена была сделана за счет соответствия свойств газовой смеси.
2 Затраты времени на определение реакции горения были сокращены с 107 до 105, что понизило некоторые из самых высоких частот при расчете.
3 Модель в основном состоит из последовательности резистивных элементов (компрессоры, турбины, отверстия…) и емкостных элементов (объемы, камеры). Проводя аналогию с электрической цепью, можно вычислить значение эквивалентного сопротивления и емкости каждого компонента (прямо пропорционального их объему). Это может быть достигнуто линеаризацией и преобразованием уравнений, описывающих физическое поведение этих компонентов. Можно показать, что каждая серия резистивных и емкостных элементов генерирует собственное значение
 ,
,
что является обратной величиной постоянной времени τ. Одна из целей этого упражнения — удалить или уменьшить высокочастотную составляющую расчета, поскольку высокие частоты напрямую вызывают необходимость уменьшения временных шагов для получения корректного решения задачи. По этой причине, исходя из приведенного соотношения, можно уменьшить частоту системы, просто увеличив размер емкостных компонентов. Это неизбежно замедлит реакцию системы. Тем не менее при поиске баланса между преимуществом времени расчета и влиянием на реакцию системы можно выбрать адекватное значение для объемов. В этом упражнении мы увеличили объемы, представляющие пути потока между компрессорами и турбинами (элементы камер), в 20 раз.
4 Как видно из рис. 5, за камерой сгорания и турбинами следует последовательность отверстий и объемов. Эти компоненты автоматически генерируются инструментом Gas Turbine Performance. Они учитывают потери давления на пути потока от одного компонента к другому. Учитывая, что целью анализа является оценка летных характеристик воздушного судна в целом, разумно предположить, что эти потери незначительны. Следовательно, отверстия и прилегающие объемы можно полностью удалить. Это уменьшит количество переменных состояния системы и собственных значений, связанных с резистивными (отверстие) и емкостными (объем) элементами.
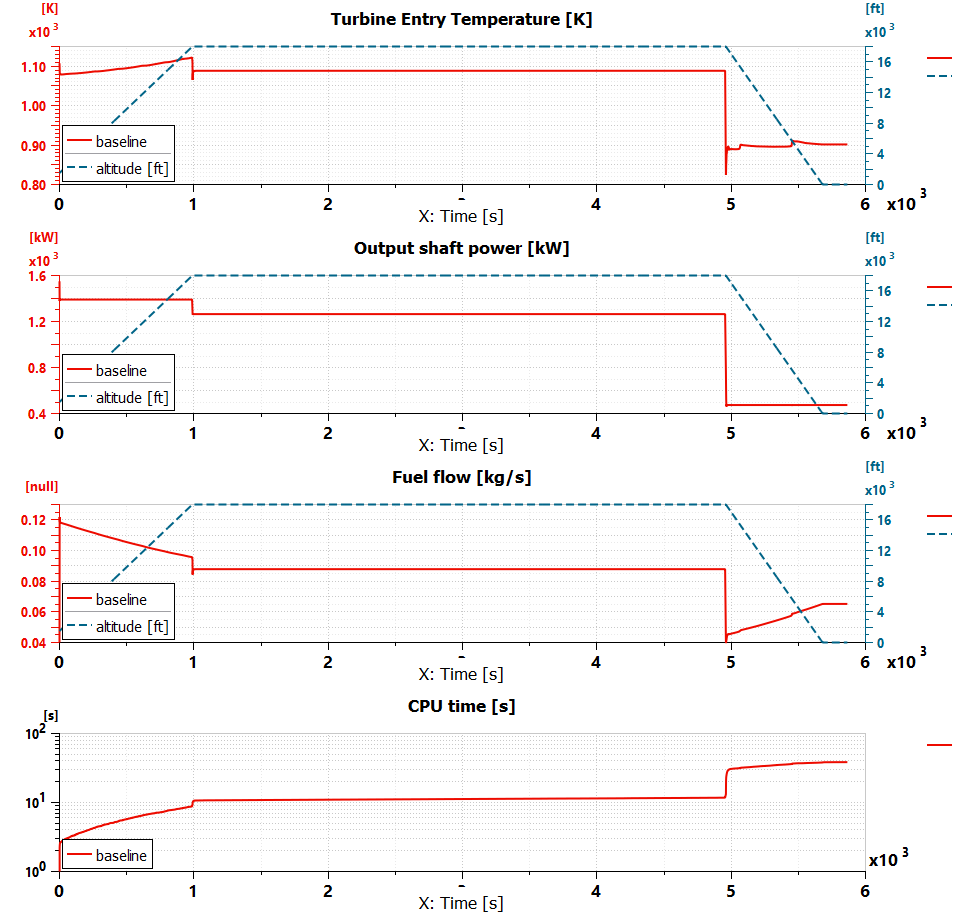
Рис. 6. Производительность базовой модели
5 Указанных модификаций достаточно, чтобы сделать модель в реальном времени совместимой с фиксированным шагом по времени 0,1 мс методом интегрирования Эйлера. Если соответствие реальному времени не является обязательным (опять же, наша цель — ускорить расчет для анализа летных характеристик), можно также изменить настройки решателя. При тщательном увеличении допуска решателя можно улучшить процессорное время без ущерба для точности расчета. В этом примере мы увеличиваем допуск решателя с 107до 105.
Сравнение производительности между результатами базовой модели и модели пониженного порядка представлено на рис. 7. При том, что различия незначительны, время ЦП уменьшилось почти в 70 раз. Это впечатляющее достижение со значительным ускорением ЦП. Полное полетное задание продолжительностью 5865 с (1 ч 38 мин) теперь может быть рассчитано за 0,586 с, то есть для одиночного расчета потребуется менее секунды процессорного времени.
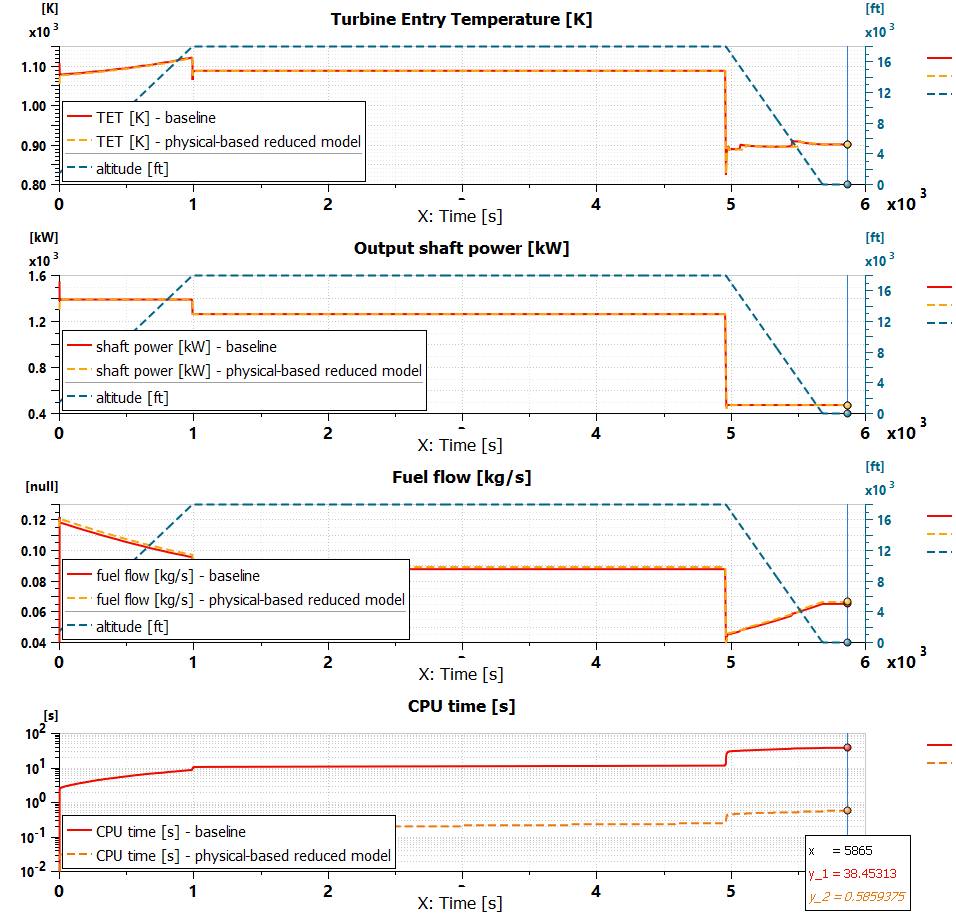
Рис. 7. Сравнение базовой и физической модели пониженного порядка
Понижение порядка с помощью глубокого машинного обучения
Другой ROMметод заключается в создании суррогатной модели с использованием машинного обучения. Суррогатные модели обычно разрабатываются изза их значительного преимущества в производительности по сравнению с более детальными реализациями моделей для конкретных приложений или дисциплин (например, на основе физики). Однако суррогатные модели не только принимают все допущения и ограничения моделей, на которых они основаны, но также включают дополнительные ограничения, связанные с их конкретной реализацией.
Simcenter Amesim оснащен инструментом Neural Network Builder, способным создавать искусственные нейронные сети из моделей Simcenter Amesim или внешних наборов данных. Выполняем три основных шага по созданию нейронной сети:
- Импорт набора данных для обучения и валидации.
- Описание нейросети (входы, выходы, гиперпараметры).
- Обучение и валидация нейросети на основе набора данных.
Чтобы создать согласованный набор данных для обучения и проверки, мы изменили базовую модель, представленную на рис. 5. Граничные условия системы изменялись случайным образом в пределах согласованного диапазона значений. Эти граничные условия включают высоту, число Маха, напрямую связанные с полным и статическим давлением и температурами на входе и выходе двигателя, а также расход топлива и скорость вращения вала и являются входными данными модели. Выходные данные — это крутящий момент вала и температура на входе в турбину. На рис. 8 показана переработанная модель, представляющая собой базовую модель, инкапсулированную в суперкомпонент, расположенный в центе эскиза.
На рис. 9 приведен график сгенерированного набора данных с входом слева и выходом справа. Учитывая, что интерес моделирования сосредоточен на низкочастотной динамике, для обучения мы выбрали статическую модель нейронной сети. На рис. 10 показан этап проверки с общими индексами верности обучения и валидации 98%. Результатом работы построителя Neural Network Builder является компонент, встраивающий модель искусственной нейросети. Рис. 11 демонстрирует, как этот компонент заменяет собственную модель турбовального двигателя Simcenter Amesim, изображенную на рис. 8.
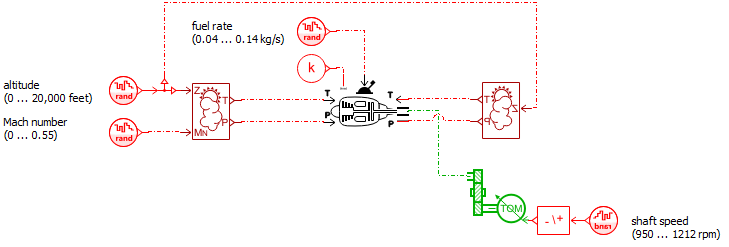
Рис. 8. Модель турбовального двигателя подготовлена с целью создания набора данных для обучения и проверки алгоритма нейронной сети
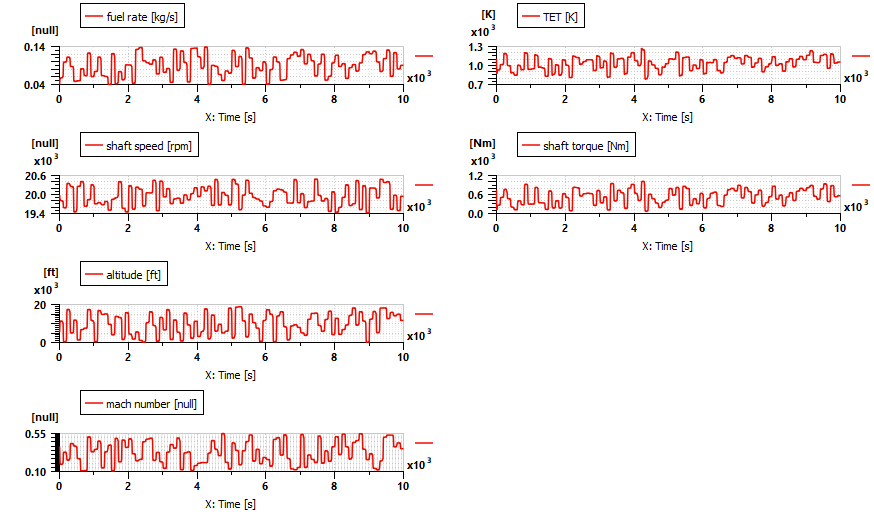
Рис. 9. Обучающий набор данных: входы слева, выходы справа
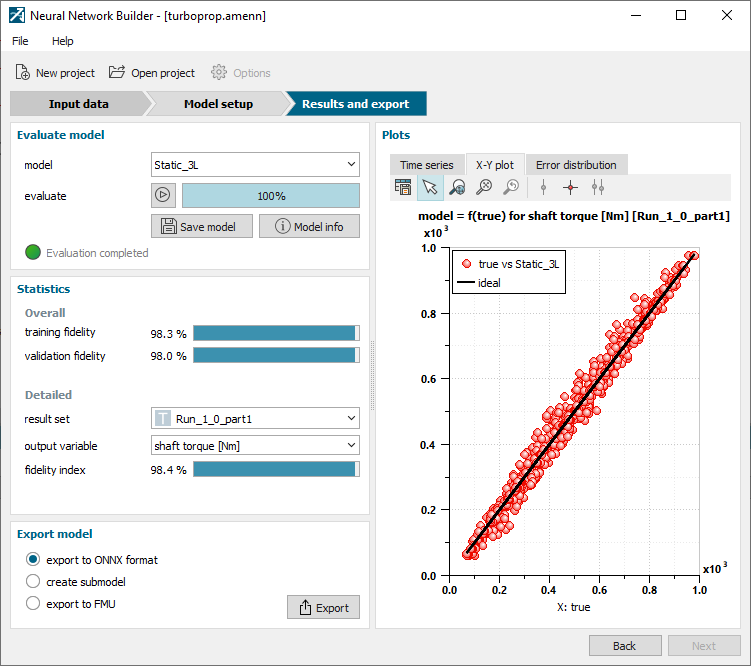
Рис. 10. Шаг проверки модели нейронной сети
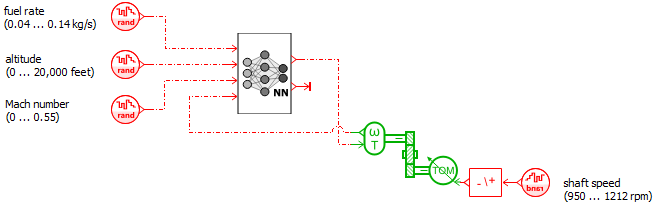
Рис. 11. Модель двигателя. Суперкомпонент Simcenter Amesim заменен на блок искусственной нейронной сети
Наконец, на рис. 12 приведено сравнение результатов, полученных с помощью модели нейронной сети, с базовой и физической моделями пониженного порядка. Модель нейронной сети имеет тенденцию слегка завышать температуру на входе в турбину во время крейсерского полета и занижать ее во время снижения. Поскольку эта ошибка ниже 2% по отношению к исходному уровню, она считается приемлемой. Время ЦП при этом сокращается примерно в 2500 раз, а следовательно, полный полет на 5865 с (1 ч 38 мин) теперь может быть выполнен за 0,015 с, что для одного расчета составляет 15 мс процессорного времени. Это очень малый промежуток времени, поэтому теперь можно выполнять сотни или тысячи расчетов, чтобы охватить весь диапазон расчетных случаев.
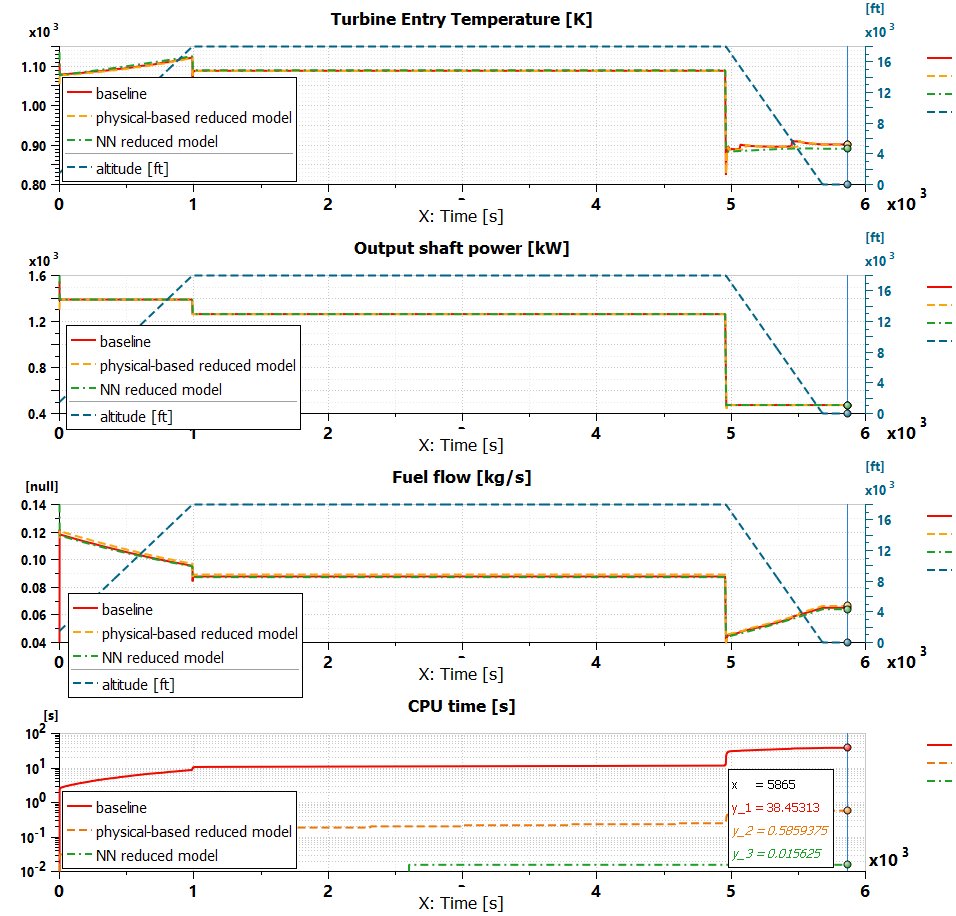
Рис. 12. Сравнение производительности базовых моделей, моделей пониженного порядка на основе физических данных и моделей пониженного порядка нейронных сетей
Модель летных характеристик
В заключение включим ROMмодели двигателя в комплексную модель самолета для определения его летных характеристик.
Чтобы сравнить результаты работы имитационных моделей, в качестве удельной дальности полета (SAR) была выбрана высокоуровневая метрика. SAR определяется как расстояние, пройденное воздушным судном в морских милях на один килограмм израсходованного топлива. Это синтетический показатель для оценки как работы двигателя, так и динамических характеристик полета, что делает его хорошим инструментом для оценки различий при использовании разных ROMмоделей. На рис. 13а показано изменение SAR на первом участке полета (вместе с профилем высоты), на рис. 13б — процессорное время.
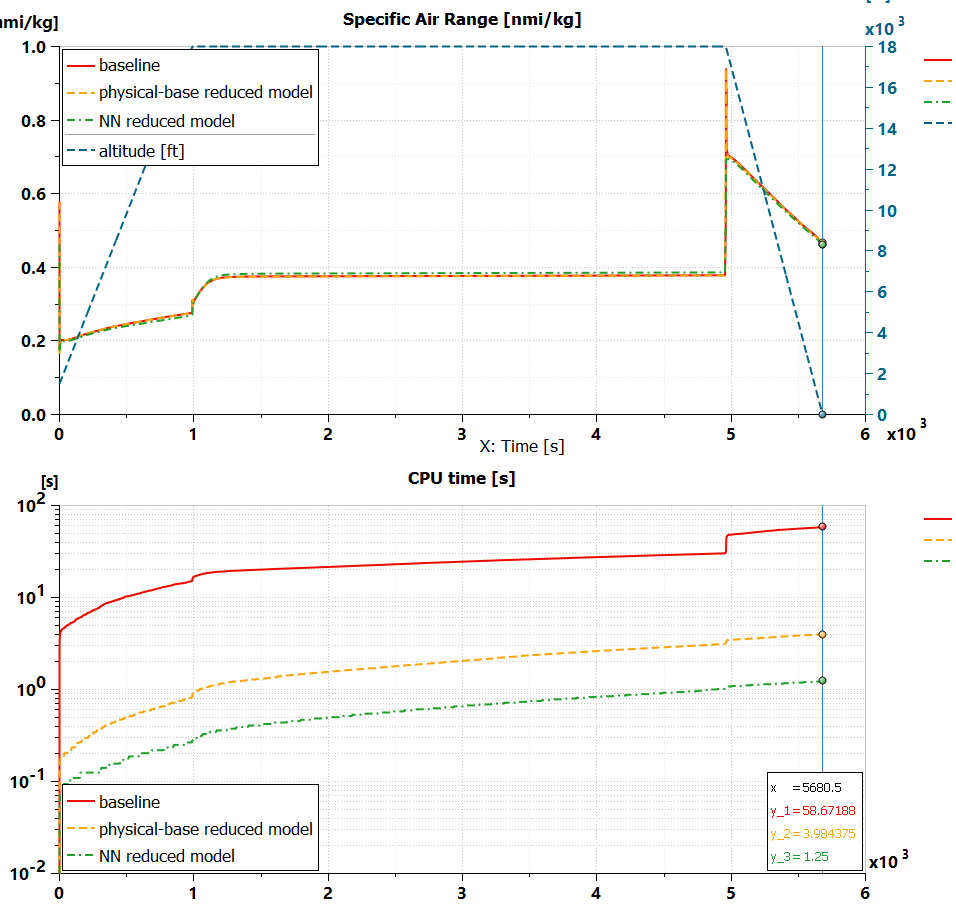
Рис. 13. Сравнение производительности интегрированной модели двигателя с моделью пониженного порядка: SAR (а) и время ЦП (б)
Подход с использованием нейронной сети попрежнему обеспечивает самое быстрое время расчета. Однако его ускорение по сравнению с физическим подходом менее выражено, чем для моделей турбовинтовых двигателей, взятых отдельно. Мы можем уменьшить процессорное время интегрированной модели в 37 раз против 2500 раз для моделей двигателей по сравнению с базовой моделью. Причина в том, что есть и другие части интегрированной модели, ответственные за замедление решателя. Это уже большое достижение. Если бы нам потребовалось более значительное ускорение ЦП, нам пришлось бы исследовать иные методы понижения порядка, применяемые к другим подсистемам турбовинтового двигателя.
Заключение
В этой статье показано, как успешно использовать модель пониженного порядка для ускорения расчета. Были применены два метода для ускорения модели летных характеристик за счет модификации модели турбовинтового двигателя.
У каждой методики есть свои преимущества и недостатки:
- физическое снижение порядка требует детального понимания моделируемой физики, инструмента и принципов работы решателя для эффективного использования. Метод в основном направлен на уменьшение количества переменных состояния и динамики самых высоких моделируемых частот, для ускорения расчета;
- искусственная нейронная сеть, метод глубокого обучения, использует другой подход. Начиная с набора данных входа/выхода для модели (системы), эти алгоритмы могут быть обучены воспроизводить корреляции между ними. Такие модели очень эффективны с вычислительной точки зрения. Однако физика модели, которую они заменяют, недоступна. Их ограничение складывается с ограничениями исходной модели. Наконец, их область действия, определяемая выбором ввода/вывода и широтой набора данных, используемого для обучения алгоритма, должна применяться с осторожностью.
Надеемся, что рассмотренные в данной статье несколько полезных советов, касающихся методов понижения порядка модели, окажутся полезными для ускорения выполнения расчетов или обеспечения их совместимости в реальном времени.
Дополнительно
- Узнайте, что нового в решениях Simcenter для моделирования систем 2020.2 в https://blogs.sw.siemens.com/.
- Посмотрите это видео, чтобы узнать, как оценить характеристики региональных самолетов с обычными и гибридными силовыми установками: https://youtu.be/CwRIhi0eOoY.
Перевод с англ. Д.Ю. Карасев,
М.С. Ситников.

