

Александр Большев,
д.т.н., профессор СПбПУ, научный консультант «Бюро ESG»

Сергей Фролов,
к.т.н., доцент СПбПУ
Проектирование разнообразных плавучих морских объектов сопряжено с необходимостью решения широкого круга статических и динамических задач, а также изучения перемещения этих объектов под действием волнения, ветра, течения и льда. Подобные исследования направлены на обоснование безопасности как эксплуатации сооружения на различных стадиях его функционирования, так и выполнения морских операций с его участием. Перемещения плавучих сооружений возможны, как правило, во всех шести степенях свободы и сложным образом связаны и с самими нагрузками, вызывающими эти перемещения, и с гидродинамическим влиянием находящихся поблизости иных плавучих или стационарных объектов, и с реакцией отбойных устройств или систем удержания, которыми оснащаются некоторые сооружения. Сложность описания поведения морских объектов под действием природных нагрузок усугубляется нерегулярным характером последних. В такой ситуации использование простых инженерных методов анализа, на которых основываются российские нормативные документы, далеко не всегда обеспечивает получение надежных результатов.
Наиболее универсальным и относительно дешевым способом решения указанного перечня вопросов является создание проблемноориентированного программного комплекса (ПК), позволяющего в короткий срок выполнить математическое моделирование необходимых режимов функционирования всех вариантов создаваемых сооружений. В настоящее время несложно изучить поведение морского объекта с учетом нерегулярности внешних воздействий (например, на протяжении экстремального шторма) и выявить все слабые места того или иного инженерного решения.
Состав и возможности ПК
В СанктПетербургском политехническом университете создан и при постоянной поддержке Российского морского регистра судоходства более 20 лет успешно развивается ПК Anchored Structures [1], который способен решать большинство статических и динамических задач, возникающих у проектировщика. В настоящей статье излагаются основные возможности ПК и приводятся примеры практического его применения.
ПК построен по модульному принципу — каждый пользователь в зависимости от объема и сложности решаемых задач может расширять состав комплекса в соответствии со спецификой собственных инженерных разработок. Всего программный комплекс содержит около 50 программных модулей, которые объединены в блоки по функциональному назначению.
Блок подготовки исходных данных дает возможность в удобной форме задавать и корректировать все исходные данные, необходимые для математического моделирования. Блок программных модулей Preprocessor позволяет сформировать трехмерную модель изучаемого объекта средствами собственного редактора или с помощью созданного интерфейса передать ее в среду Anchored Structures из AutoCAD или Ansys, а также выполнить вспомогательные расчеты. Блок расчета нагрузок позволяет моделировать внешние воздействия на морской объект (регулярное или нерегулярное волнение, волны малой или конечной высоты, ветер с учетом ветровых порывов, поля ровного или торосистого льда и т.п.), вычислять внешние нагрузки на морские объекты при различных постановках задачи. Семейство статических задач решается в модулях блока статики, а динамические решения в тех или иных постановках реализуются модулями динамики. Результаты математического моделирования поведения морских объектов обрабатываются в модулях Postprocessor и представляются в табличной, графической и мультимедийной форме. Программные модули блока управления не только обеспечивают координацию всех вычислительных процессов и позволяют моделировать задачи в пакетном режиме, но и реализуют в реальном времени отображение поведения исследуемых объектов в процессе математического моделирования. Таким образом, выполняющий разработку исследователь имеет возможность визуального анализа поведения объектов в тех или иных ситуациях, что нередко оказывается эффективным инструментом инженерного анализа.
В целом возможности ПК Anchored Structures позволяют:
- определять с использованием геометрической 3Dмодели объекта осадку, водоизмещение, координаты центра величины, метацентрические высоты сооружения с учетом влияния якорного, швартовного закреплений и балласта;
- определять нагрузки от ветра, течения, волнения и льда на плавучие или стационарные объекты;
- рассчитывать гидродинамические характеристики морских объектов;
- моделировать задачи статики и динамики плавучих или заякоренных сооружений;
- моделировать морские операции с участием нескольких сооружений в заданной точке акватории.
Разработанные методологии математического моделирования поведения морских плавучих объектов, реализованные в ПК Anchored Structures, одобрены Российским морским регистром судоходства, а программный комплекс включен в Единый реестр российских программ для электронных вычислительных машин и баз данных.
На протяжении 20 лет ПК поставляется научноисследовательским и проектным организациям. В СанктПетербургском политехническом университете (СПбПУ) организовано обучение пользователей, поставки программных средств выполняет генеральный дилер ООО «Бюро ЕСГ», компанияправообладатель (ООО «ЦКМ ДМС») обеспечивает консультации заинтересованных организаций, сопровождение ПК и, при необходимости, выполнение совместных пилотных проектов. В настоящее время ПК используется рядом известных организаций: ОАО ЦКБ МТ «Рубин», АО ЦКБ «Коралл», ФГУП «Крыловский государственный научный центр», ООО «ЛУКОЙЛИнжиниринг», АО «ПО Севмаш», ООО «ВолгоградНИПИморнефть», ООО «Арктический Научный Центр», ООО «Си Эн Жи Эс Инжениринг», ООО «Фертоинг» и др.
ПК Anchored Structures применяется также в учебном процессе ряда высших учебных заведений. Согласно концепции подготовки современной генерации инженеров [2, 3], для специалистов и магистров, специализирующихся в области проектирования, строительства и эксплуатации морских объектов, на платформе этого комплекса проводится практикум по освоению основных его возможностей. Обучение студентов организовано в СанктПетербургском государственном морском университете, СанктПетербургском политехническом университете, Севастопольском государственном университете, Дальневосточном федеральном университете.
Использование ПК в научнотехнических проектах
За последние 20 лет с использованием данного программного комплекса реализовано большое число значимых проектов. Далее рассказывается о некоторых из них.
В 2001 году в рамках комплекса НИОКР по теме «Обеспечение подъема АПК “Курск”» СПбПУ была поручена «Разработка методики и программных средств для обеспечения расчетов динамики подъема и транспортировки АПК». План выполнения операции основывался на подготовке специальной баржи, оснащенной системой подъемных домкратов с компенсаторами динамических усилий, и подготовке вырезов в прочном корпусе атомного подводного крейсера (АПК) для заведения туда захватов [4]. Баржа должна была точно встать над АПК и раскрепиться с помощью системы заякорения. Далее захваты должны были быть заведены в подготовленные вырезы, а с помощью домкратов надо было создать вертикальное усилие, способное преодолеть силу присоса грунта. Затем планировалось осуществить подъем АПК, прижать его к днищу баржи и в таком виде транспортировать в док. Все названные операции должны были занять сравнительно большой промежуток времени: транспортировка — несколько суток; отрыв от грунта и подъем — около 1020 ч. За этот период погодные условия и связанные с ними внешние воздействия обычно заметно изменяются, поэтому динамические эффекты могли оказать решающее влияние на исход операции.
Основной задачей работы, выполнявшейся СПбПУ совместно с АО ЦКБ МТ «Рубин», являлось создание математических моделей совместной динамики системы «АПК — транспортная баржа» в процессе подъема и транспортировки, а также подготовка программного обеспечения для выполнения комплекса необходимых расчетов. При этом требовалось учесть воздействие ветра, течения и волнения на корпуса плавучих сооружений, описать работу якорных, грузонесущих связей, оснащенных специальными компенсаторами, отбойных устройств и, в конечном счете, обеспечить адекватную оценку динамики подъема и транспортировки АПК при различных гидрометеорологических условиях с учетом принятия тех или иных альтернативных инженерных решений.
При решении поставленной задачи с помощью ПК Anchored Structures были выполнены следующие работы:
- моделирование баржи на начальном этапе подъема, когда АПК лежит на грунте, и сила, прикладываемая через грузонесущие связи, еще не способна оторвать его ото дна;
- моделирование динамики АПК и баржи в момент отрыва АПК ото дна;
- моделирование динамики АПК и баржи в процессе подъема АПК с помощью домкратов, оснащенных компенсаторами;
- моделирование динамики АПК и баржи непосредственно перед и после соединения АПК с баржей;
- моделирование динамики баржи и АПК в процессе транспортировки.
На основе математического моделирования были выполнены конструкторские проработки и определены погодные условия, при которых можно было проводить операцию подъема (рис. 1). Полученные результаты были всесторонне проверены на экспериментальных установках в ЦНИИ им. акад. А.Н. Крылова. Как известно, подъем АПК «Курск» был завершен 8 октября 2001 года. Для этого были выполнены численное и физическое моделирования всех этапов операции [4].
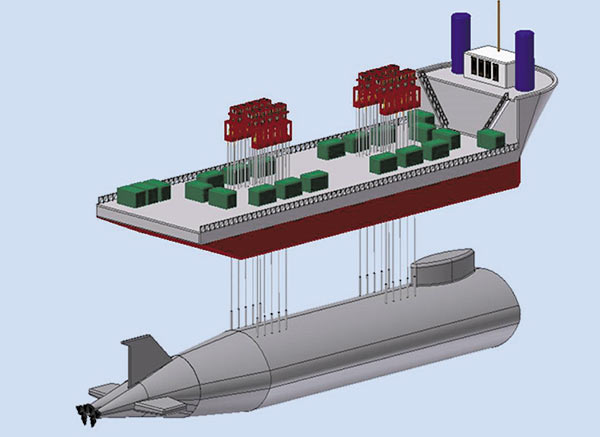
Рис. 1. Математическое моделирование подъема АПК «Курск»
ПК Anchored Structures использовался также для математического моделирования накатки верхнего строения платформы (ВСП) «Хаттон» на опорное основание платформы, созданной для освоения месторождения «Приразломное» [5].
Суть операции заключалась в предварительной установке опорного кессона, доставке ВСП на барже к кессону и накатке ВСП на кессон. Использование разработанных программных средств позволило одновременно моделировать воздействие ветра, течения и волнения, гидродинамическое взаимодействие корпусов барж и кессона, а также движение ВСП вдоль палубы кессона. При этом осуществлялось моделирование во времени заполнения 30 балластных цистерн баржи для компенсации передачи веса ВСП на кессон, упор баржи в опорное основание и шарнир, обеспечивающий соединение барж с кессоном, движение транспортных тележек и контактные усилия в 25 колесных парах (рис. 2).
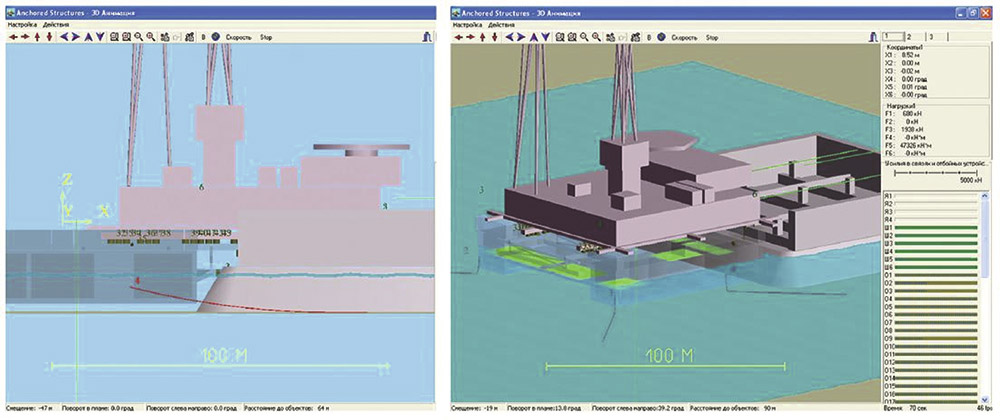
Рис. 2. Математическое моделирование накатки верхнего строения на опорное основание платформы «Приразломная»
На основании моделирования проводилось изучение динамических параметров накатки ВСП «Хаттон» на опорное основание при различных направлениях ветра, течения, волнения и некоторых случайных воздействиях. На различных фазах накатки проверялась текущая осадка баржи в процессе передачи веса на опорное основание, контролировалась работоспособность захвата, соединяющего баржу и опорное основание.
Результаты математического моделирования использовались для обеспечения необходимого уровня безопасности данной операции. Операция накатки, успешно проведенная в сентябре 2006 года силами ПО «Севмашпредприятие» с участием российских и зарубежных соисполнителей, показала, что принятые основные технические решения, базирующиеся, в том числе, и на представленных авторами результатах математического моделирования, себя оправдали.
Математическое моделирование морских операций, связанных с погрузкой нефти, выполнялось авторами совместно с инженерами АО «ЦКБ Коралл» в 2005 году. В процессе реализации этой операции стационарный морской ледостойкий отгрузочный причал (СМЛОП), устанавливаемый в районе полуострова Варандей, отгрузочный шланг, танкер и удерживающий его буксир должны были находиться в непрерывном взаимодействии, динамические аспекты которого во многом определяли условия обеспечения допустимого уровня безопасности.
Математическое моделирование было направлено на изучение поведения танкеров дедвейтом 70 000 т и 20 000 т, при стоянке в ошвартованном состоянии у причала в процессе отгрузки нефтепродуктов [6]. Предполагалось, что танкеры могут быть подвержены воздействиям ветра, течения, волнения и льда. Под действием постоянных и переменных во времени сил танкер может совершать колебания в различных степенях свободы. При этом на основании математического моделирования необходимо было определить условия, при которых можно обеспечить безопасность выполнения данной операции и найти оптимальные режимы взаимодействия танкера, вспомогательного судна, швартовой системы, нефтеотгрузочного шланга для максимального расширения погодных условий, при которых гарантируется безопасность отгрузки нефтепродуктов.
Программный комплекс позволил рассчитывать внешние нагрузки на объекты, участвующие в этой морской операции, определять силы, возникающие в швартовных тросах, анализировать динамику отгрузочного шланга с учетом мгновенных значений скорости движения нефти внутри него и давления, под которым она находится.
Для всестороннего анализа поведения системы «СМЛОП — танкер — буксир» было сформировано около 400 расчетных ситуаций, различающихся дедвейтом танкера, его осадкой, режимом нерегулярного волнения, направлением распространения волн, скоростью и направлением ветра и течения, толщиной льда, упором движительного комплекса танкера и тягой буксира. С помощью программного комплекса все расчетные ситуации были последовательно промоделированы, получено общее представление о поведении системы «СМЛОП — танкер — буксир» (рис. 3).
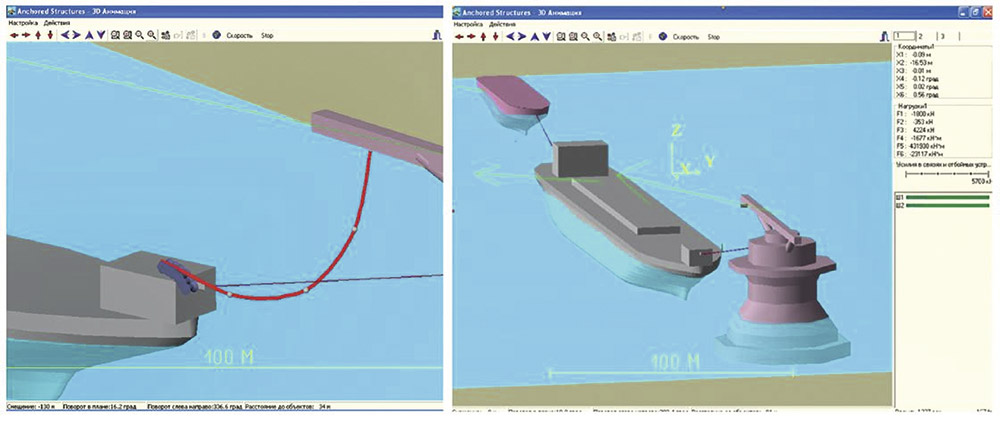
Рис. 3. Математическое моделирование поведения системы «СМЛОП — танкер — буксир»
Кроме того, на основании проведенного численного моделирования получены результаты, позволяющие определить условия, при которых обеспечивается безопасность выполнения операций по перегрузке нефти со СМЛОП, и определены оптимальные режимы взаимодействия танкера, вспомогательного судна и швартовой системы для максимального расширения погодных условий, при которых гарантируется безопасность отгрузки нефтепродуктов. Затем полученные решения, обеспечивающие безопасность СМЛОП, были проверены с помощью физического эксперимента в Крыловском ГНЦ в диапазоне допустимых погодных условий. Физический эксперимент подтвердил полученные ранее результаты математического моделирования. При этом объем лабораторных исследований по сравнению с численными расчетами удалось минимизировать за счет сокращения на порядок числа расчетных ситуаций, подлежащих экспериментальному моделированию. В 2007 году этот самый северный в мире стационарный морской ледостойкий отгрузочный причал вошел в эксплуатацию и успешно функционирует до настоящего времени.
На базе разработанного ПК можно создавать сложные модели, синтезирующие возможности описанных выше методологий с результатами, получаемыми из других ПК. Примером такой технологии является разработанный способ решения задачи о динамике двустворчатого плавучего затвора с сегментными батопортами, входящего в состав судопропускного сооружения С1 комплекса защитных сооружений СанктПетербурга от наводнений.
Плавучий затвор представляет собой два криволинейных водоизмещающих корпуса, которые предназначены для перекрытия судоходного канала при возникновении угрозы наводнения. Батопорты, входящие в состав створки плавучего затвора, после вывода их в рабочее положение должны быть погружены по заданному пространственновременному закону на порог и находиться в этом положении в устойчивом состоянии, перекрывая собой судопропускной канал С1. Посадка батопорта на порог должна осуществляться путем заполнения водой балластных цистерн, а всплытие — с помощью удаления воды из балластных цистерн.
Вопросы моделирования заполнения балластных цистерн, моделирования волновых нагрузок, расчета гидродинамических характеристик являются стандартными для ПК Anchored Structures.
Однако сложность моделирования поведения плавучего затвора в большой степени оказалась связанной с течением жидкости под батопортами, которое провоцировало развитие его автоколебаний. Для адекватного описания поведения батопортов постановка задачи обтекания в идеальной жидкости, свойственная Anchored Structures, являлась недостаточной. В связи с этим в Лаборатории прикладной математики и механики СПбПУ на многопроцессорном кластере (суперкомпьютере) с помощью программного комплекса CFX было выполнено комплексное моделирование процессов обтекания вязкой жидкостью створок батопорта [7].
Анализ процессов обтекания позволил объяснить характер поведения батопорта в потоке вязкой жидкости, параметрически описать силы, действующие на батопорт со стороны потока и интегрировать описание этих сил в ПК Anchored Structures. На основе математического моделирования в ПК Anchored Structures совместно с ОАО ЦКБ МТ «Рубин» и ОАО «ВНИИГ им. Б.Е. Веденеева» [8] был отработан алгоритм функционирования плавучего затвора, минимизированы его колебания, исследована и оптимизирована система мягкой посадки батопортов на порог (рис. 4). В настоящее время плавучий затвор с сегментными батопортами введен в эксплуатацию и уже защитил СанктПетербург от нескольких опасных наводнений.

Рис. 4. Математическое моделирование поведения плавучих батопортов комплекса защиты Санкт-Петербурга от наводнений
Примером успешного использования ПК Anchored Structures является также разработка уникальной морской операции, потребность в которой возникла при сооружении Крымского моста.
Мост представляет собой длинную эстакаду с пролетами от 54,2 до 64,2 м, а КерчьЕникальский канал перекрывается арками (по одной на авто и железнодорожном мосту) длиной 227 м и высотой 45 м с подмостовым судоходным габаритом высотой 35 м и шириной 185 м.
Установка судоходного пролета (согласно проекту [9]) должна была выполняться с помощью понтонной плавучей системы. Плавучая система включала две соединенные между собой плавучие опоры длиной 60,2 м, шириной — 16,5 м, высотой борта — 5 м (рис. 5). На эти плавучие опоры надо было погрузить судоходный пролет с берегового стапеля (рис. 6), отбуксировать пролет к месту установки, а затем поднять и установить пролет на стационарные опоры Крымского моста.

Рис. 5. Плавучая опора (фото пресс-службы Севастопольского морского завода)
Одной из наиболее сложных и ответственных задач стало обеспечение позиционирования плавучей системы в момент передачи массивного пролетного строения со стапеля на систему плавучих опор и подъем пролетного строения с плавучей системы на стационарные опоры Крымского моста. Ввиду податливости плавучих опор при воздействии ветра, течения и волнения система «плавучие опоры — пролетное строение» совершала колебания, которые могли стать причиной аварийной ситуации. Значительная масса этой системы и большие габаритные размеры определяют уникальность данной морской операции. Именно правильное определение параметров системы позиционирования, обеспечивающей выполнение технологических операций, связанных с перемещением плавучих опор по отдельности и плавучей системы в целом, имело огромное значение для успешного завершения важнейшего этапа строительства Крымского моста — этапа установки пролетных арочных строений на мостовые опоры.
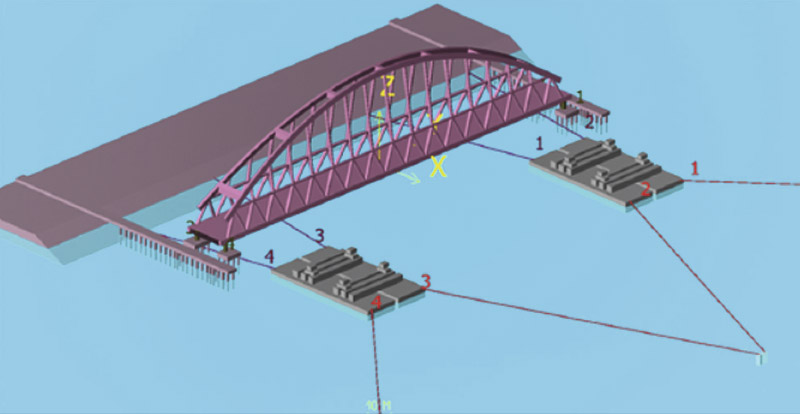
Рис. 6. Забалластированные плавучие опоры перед заведением под пролетное арочное строение (модель в ПК Anchored Structures)
Расчетный анализ, выполненный в ПК Anchored Structures, охватывал все этапы проведения морской операции, в том числе:
- Работы, выполняемые в операционной акватории «ковша» у стапеля.
- Транспортировка плавучей системы из акватории «ковша» по подходному каналу и далее по Керченскому подходному и КерчьЕникальскому каналам к месту монтажа арочных пролетных строений.
- Позиционирование и монтаж пролетных строений в створе моста.
Требования, предъявляемые к точности позиционирования в «ковше» и в створе моста, были весьма высоки. Так, например, в условиях предельных внешних воздействий требуемая точность позиционирования в «ковше» составляет всего ± 5 см, а при позиционировании в створе моста — ± 30 см.
Этапы выполнения морской операции были последовательно промоделированы в ПК инженерами ЦКБ «Коралл» [10]. В ходе выполнения реальных операций в створе моста параметры канатов и лебедок, выбранные с помощью ПК Anchored Structures, позволили добиться при позиционировании большей, чем требовалось, точности и установить плавучую систему с пролетными арочными строениями с отклонением менее 10 см от теоретического положения. При позиционировании в «ковше» была обеспечена необходимая точность ± 5 см, а погрузка пролетных строений выполнена на проектные точки опирания (рис. 710).
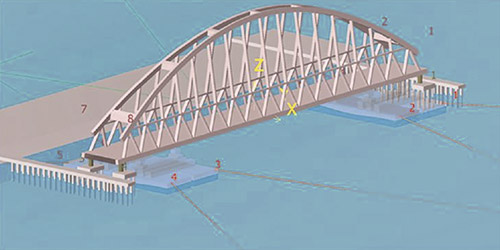
Рис. 7. Позиционирование забалластированных плавучих опор под пролетным арочным строением с учетом воздействия ветра течения и волнения со стороны открытой акватории
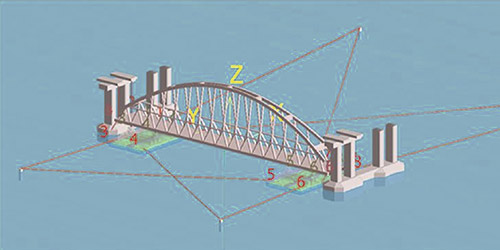
Рис. 8. Позиционирование плавучей системы в створе моста и удержание в процессе подъема пролетного арочного строения

Рис. 9. Плавучая система с железнодорожным пролетным строением на оси подходного канала (27 августа 2017 г., фото АО «ЦКБ «Коралл»)
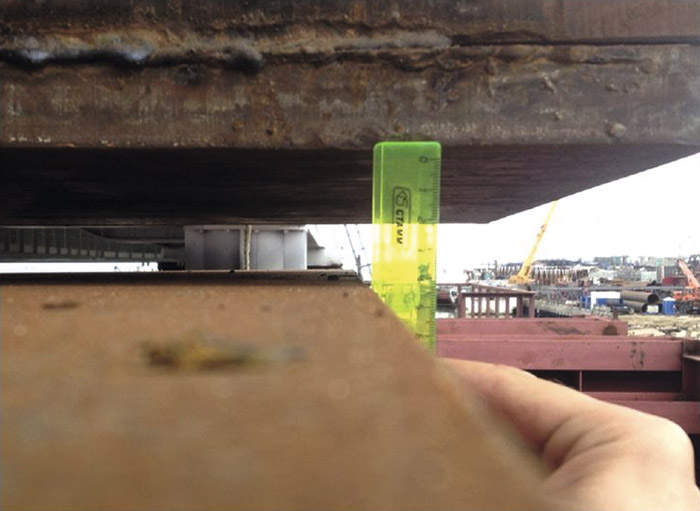
Рис. 10. Размах качки при установке автодорожного пролетного строения (менее 5 см). Высота волнения — около 0,3 м (9 октября 2017 г., фото АО «ЦКБ «Коралл»)
Заключение
Разработанные методологии математического моделирования поведения морских плавучих объектов, реализованные в программном комплексе Anchored Structures, одобрены Российским морским регистром судоходства, комплекс включен в Единый реестр российских компьютерных программ и используется рядом известных научноисследовательских и проектных организаций.
На основе использованных методологий и с помощью единого ПК удается осуществить моделирование поведения самых различных морских плавучих объектов на разных этапах их возведения или эксплуатации, в различных режимах их функционирования, при тех или иных внешних воздействиях. Анализ широкого перечня моделируемых ситуаций позволяет принять наиболее обоснованные проектные решения, оптимизирующие конструкцию плавучего объекта или системы его удержания и обеспечивающие приемлемый уровень безопасности морских объектов.
Литература:
- Большев А.С., Фролов С.А., Кутейников М.А. Математическое моделирование поведения морских плавучих объектов в программном комплексе Аnchored Structures // Науч.техн. сб. Российского морского регистра судоходства. 2013. № 36.
- Альхименко А., Большев А., Тучков А., Фертман И. Информационные технологии как ключевой элемент при подготовке нового поколения инженеровстроителей // САПР и графика. 2002. № 12.
- Альхименко А.И., Большев А.С., Ватин Н.И. Подготовка нового поколения инженеровстроителей // Научнотехнические ведомости СПбГПУ. 2007.
- Баранов И.Л. и др. Математическое моделирование динамики подъема и транспортировки АПК «Курск» // Научнотехнические ведомости СПбГПУ. 2002. № 1.
- Большев А.С., Торопов Е.Е., Фролов С.А. Математическое моделирование процесса накатки верхнего строения на опорное основание морской платформы Приразломного нефтяного месторождения // Гидротехническое строительство. 2007. № 5.
- Большев А.С., Благовидова И.Л., Фролов С.А. Математическое моделирование и программное исследование работы системы «Морской отгрузочный причал — Танкер — Буксир» // Сб. трудов конференции «Освоение арктического шельфа России». 2007.
- Большев А.С., Климович В.И., Чернецов В.А., Петухов Е.П. Исследования гидродинамических воздействий и доработка системы мягкой посадки батопортов плавучего затвора C1 комплекса защитных сооружений СанктПетербурга от наводнений // Известия ВНИИГ им. Б.Е. Веденеева. 2013. Т. 268.
- Большев А.С., Чернецов В.А., Фролов С.А., Филиповская Т.В. Система мягкой посадки плавучего затвора судопропускного сооружения С1 комплекса защитных сооружений СанктПетербурга от наводнений // Инженерностроительный журнал. 2012. № 9.
- Благовидова И.Л., Большев А.С., Пьянов А.В. Математическое моделирование операций по установке пролетных строений Крымского моста. Научнотехнические ведомости СПбПУ // Естественные и инженерные науки. № 2. 2018.
Благовидова И.Л., Большев А.С., Пьянов А.В. Проектирование и реализация морской операции по установке пролетных строений Крымского моста // Научнотехнический сборник РМРС. 2018. Вып. 52/53.

