

Александр Стремнев,
к.т.н., доцент кафедры информационных технологий Белгородского государственного технологического университета им. В.Г. Шухова
С единственной гласной литерой в аббревиатуре САПР всегда связано ожидание если не технических чудес, то, по крайней мере, действительно серьезной автоматизации трудозатратных проектных процедур. А их в нелегкой конструкторской практике встречается немало. В этом материале мы коснемся некоторых рабочих моментов такого раздела информационного обеспечения САПР, как механические передачи. В фокусе внимания окажутся представители систем «средней тяжести» — Autodesk Inventor и АСКОН КОМПАС-3D.
Информационное обеспечение является важнейшей составляющей САПР. Действительно, за многовековую историю развития технологий арсенал конструктора пополнился огромным количеством наработок: механические передачи, различные разъемные и неразъемные соединения, элементы гидравлических, электротехнических и других систем. База типовых инженерных решений растет лавинообразно, соответственно работа проектировщика зачастую подобна «игре в конструктор», когда из готовых «кубиков» в соответствующей обвязке создается новый объект.
Посмотрим, каким образом реализуется этот несомненно ускоряющий проектирование подход в некоторых отечественных и зарубежных системах (с оглядкой на объективную активизацию политики импортозамещения в области САПР). Задача — азбучная: построить модель зубчатой передачи.
Итак, начнем с продукта корпорации Autodesk, а именно Inventor. Здесь на вкладке Design (Конструирование) имеется набор модулей-надстроек для соответствующих конструкций; выберем инструмент Spur Gear (Цилиндрическая зубчатая передача) — рис. 1. В окне надстройки указываются необходимые параметры передачи, и после проверки результатов автоматизированного расчета происходит генерирование модели передачи в виде узла-сборки, состоящей из шестерни и колеса. Этот узел при необходимости редактируется (из контекста) в том же самом диалоговом окне с последующим автоматическим обновлением обеих деталей передачи и соединения в целом. Заметим также, что между деталями передачи автоматически строятся сборочные зависимости по условиям зацепления (межосевому расстоянию, передаточному отношению и др.). Готовый узел-передачу можно добавлять в сборки более высокого уровня с сохранением возможности редактирования параметров зацепления.
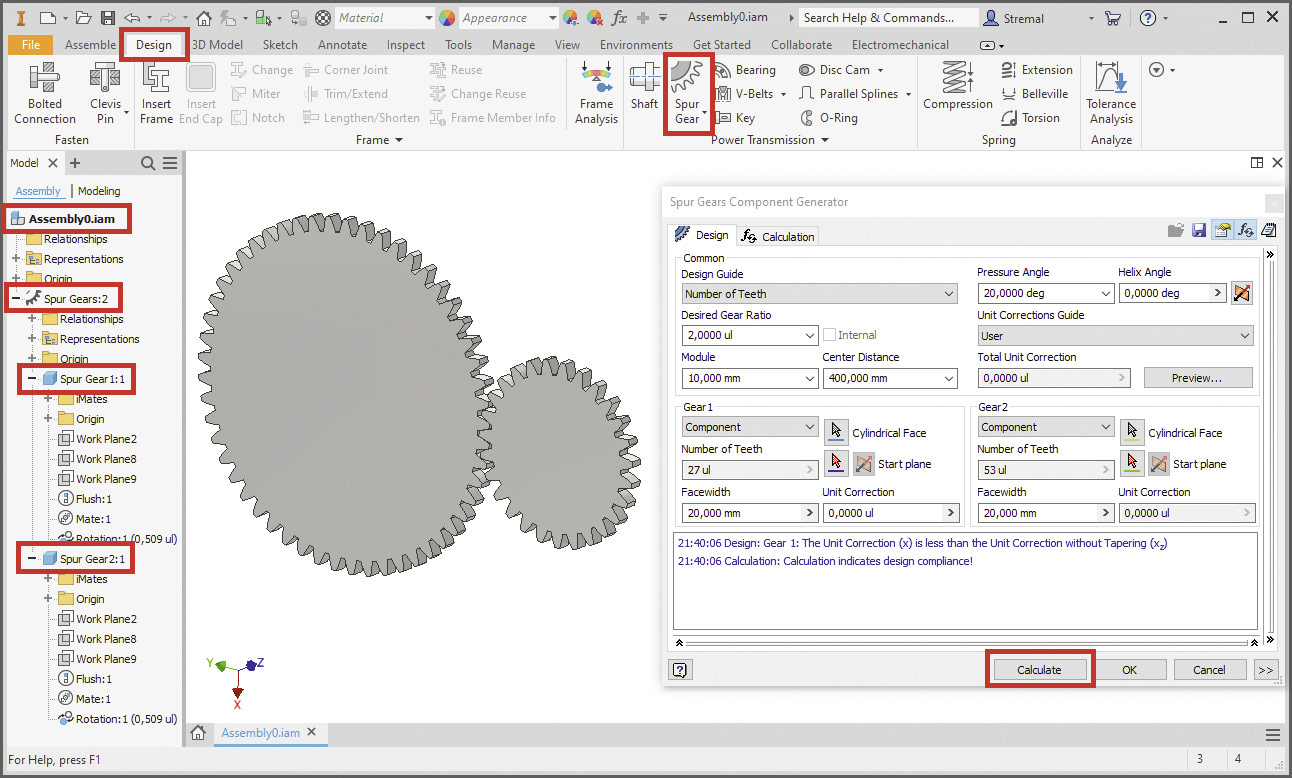
Рис. 1
Теперь обратимся к системе КОМПАС-3D от компании АСКОН [1]. Здесь также имеется набор модулей-генераторов, среди которых находим интересующий нас инструмент — Приложения -> Механика -> Валы и механические передачи 3D -> Шестерня цилиндрическая с внешними зубьями (рис. 2). Уже на этом этапе обращает на себя внимание принципиальное отличие рассматриваемых систем — в Inventor запуск генератора передачи осуществляется в среде сборки, а КОМПАС-3D требует, чтобы текущим типом документа была деталь. Модуль конструирования передачи КОМПАС-3D аналогично продукту Autodesk позволяет указать параметры передачи, выполнить расчет и сгенерировать… нет, не передачу, а только одно из зубчатых колес (на выбор шестерню или ведомое колесо посредством переключателя Сменить элемент).
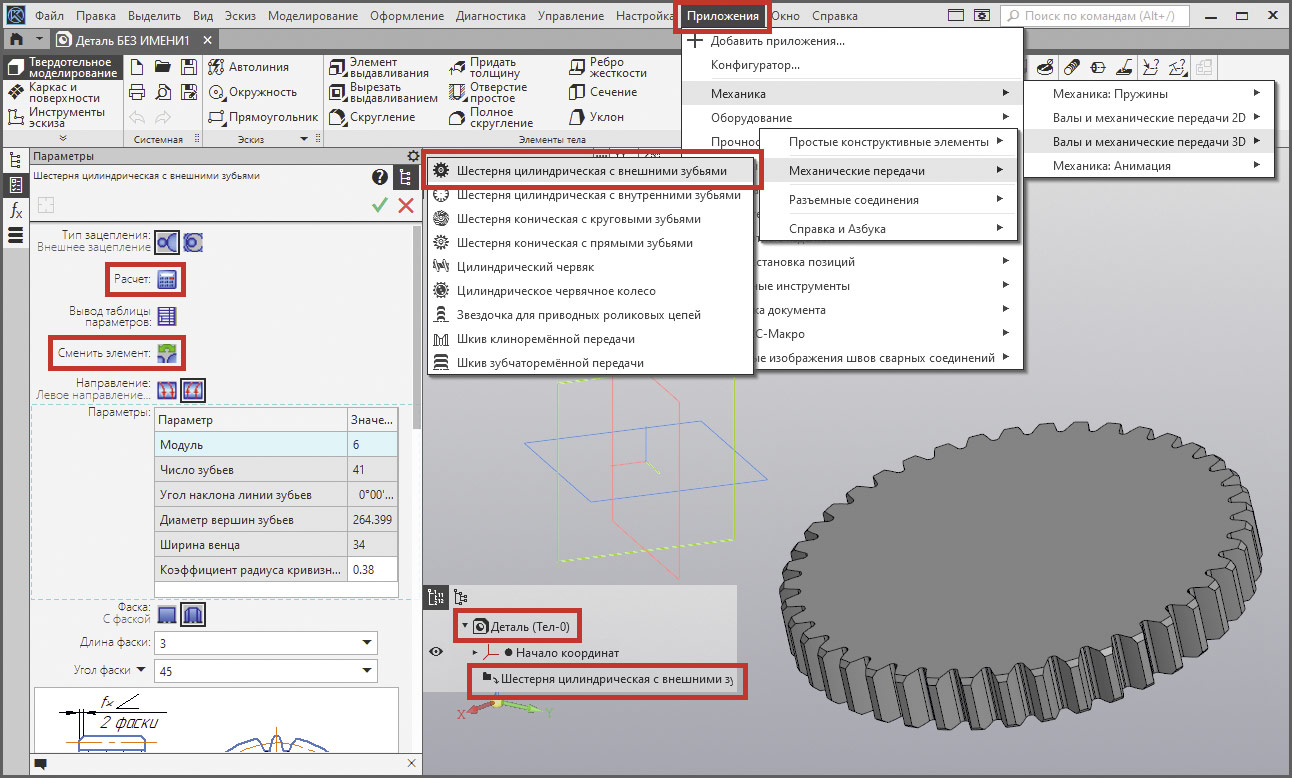
Рис. 2
При редактировании элемента передачи (в структуре детали) можно сменить компонент, но два колеса одновременно мы не получаем. В принципе логика разработчиков понятна, поскольку мы оперируем деталью, то получать в ней сборку-узел нецелесообразно, но речь ведь идет о проектировании ПЕРЕДАЧИ, состоящей как минимум из двух основных сопрягаемых деталей. Конечно, можно создать еще один файл детали и сгенерировать в нем «ответную» часть зацепления, используя ту же программную надстройку с аналогичными параметрами. Но в таком случае возникают две проблемы. Первая заключается в том, что параметры передачи будут указываться независимо в двух отдельных объектах (полученных из модуля генератора) в разных файлах, поэтому следить за согласованностью этих объектов должен сам проектировщик. Ему же (и это — вторая проблема) придется «соединять» зубчатые колеса в собственно передачу уже на уровне сборки.
Попытаемся «прощупать» процесс изнутри и создадим передачу вращения в КОМПАС-3D без помощи генераторов, учитывая вышеизложенные соображения.
Для простоты реализации моделировать будем зацепление не с эвольвентным, а с круглым профилем. Сначала в пустом файле детали построим эскиз со схемой зацепления и образующими окружностями для шестерни и колеса (рис. 3). На панели переменных сформируем необходимый перечень параметров передачи, ключевыми из которых будут межосевое расстояние (a), передаточное отношение (n), толщина дисков колес (h). Количество зубцов шестерни (z1) примем равным постоянной величине (10). Параметры привяжем к размерам эскизной геометрии.
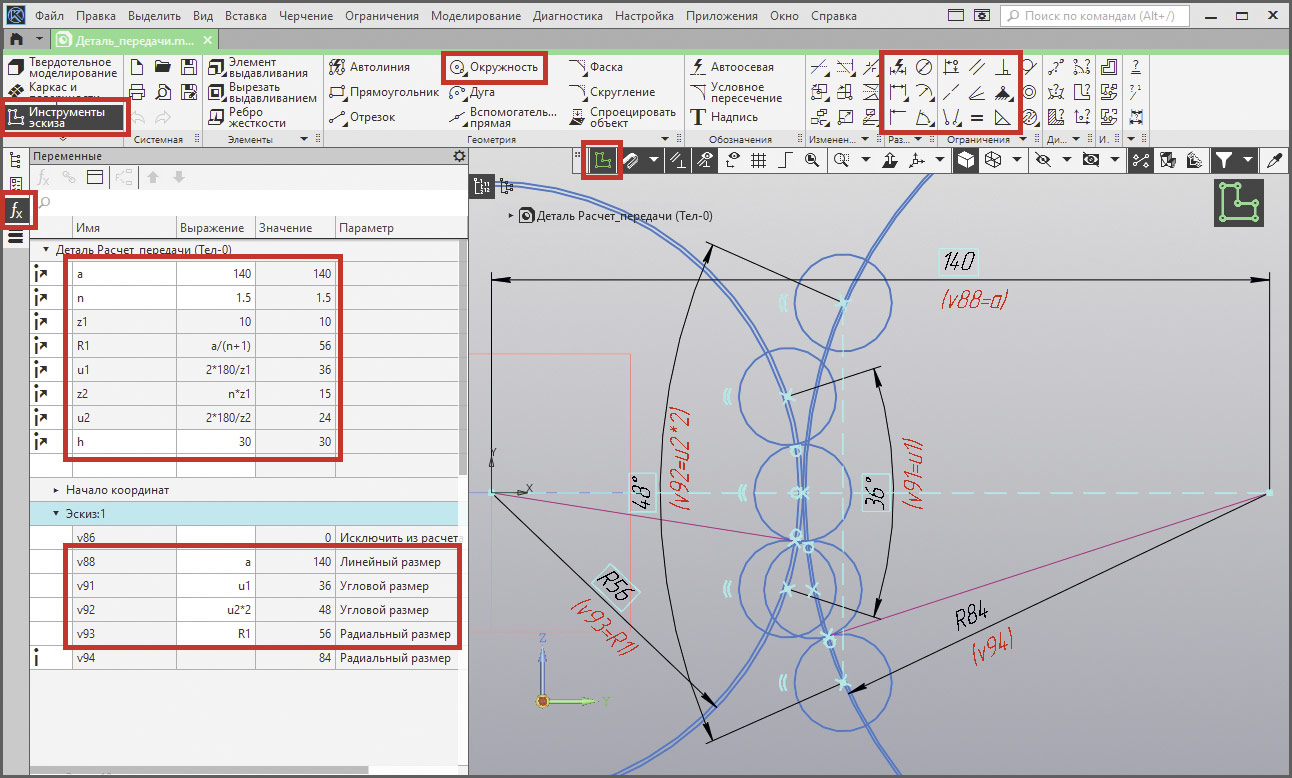
Рис. 3
Далее, применяя Элемент выдавливания и Массив по концентрической сетке, сформируем геометрию шестерни (рис. 4). При использовании выдавливаний задействуем булевы операции Объединение и Вычитание, а в качестве параметров всех объемных элементов будем применять необходимые параметры передачи (например, количество зубцов для количества экземпляров в круговом массиве).
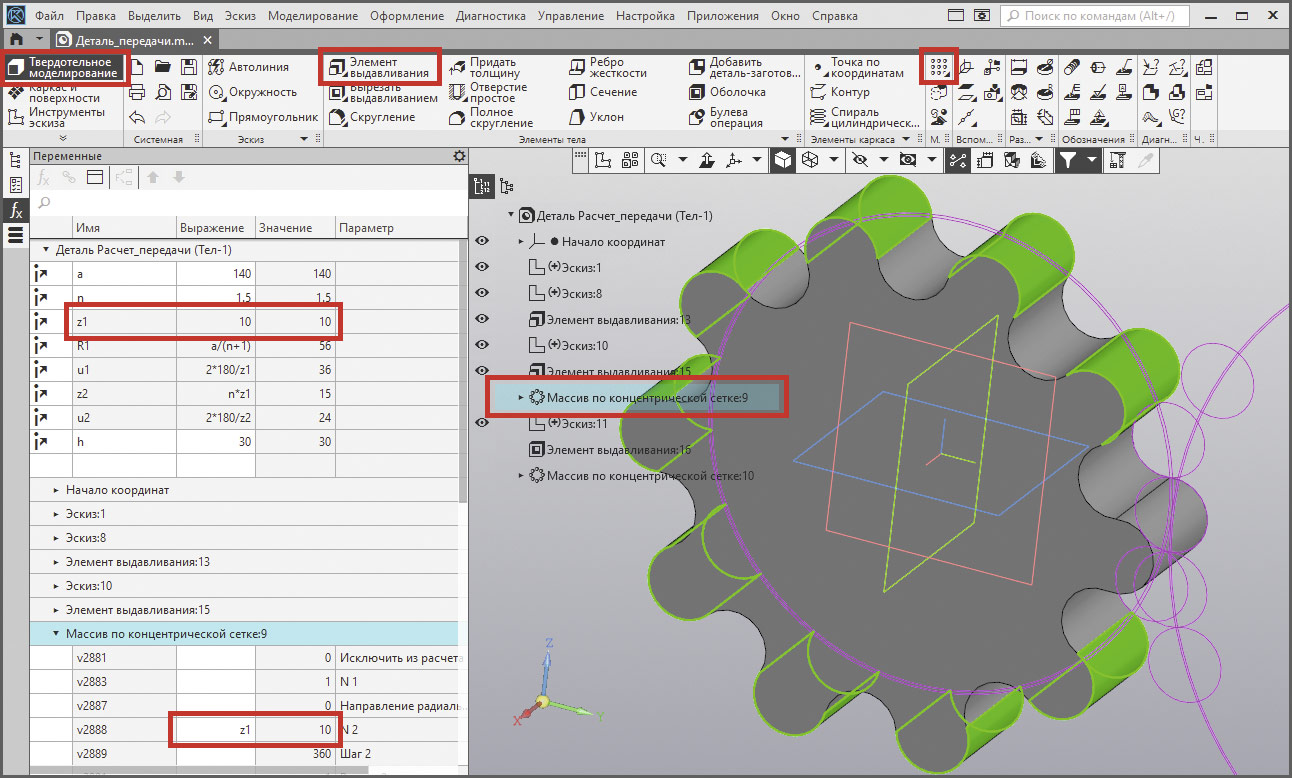
Рис. 4
Затем в том же файле реализуем геометрию колеса (рис. 5), не забыв поместить ее в Новое тело. На этом этапе имеет смысл проверить корректность построений изменением ключевых параметров модели.
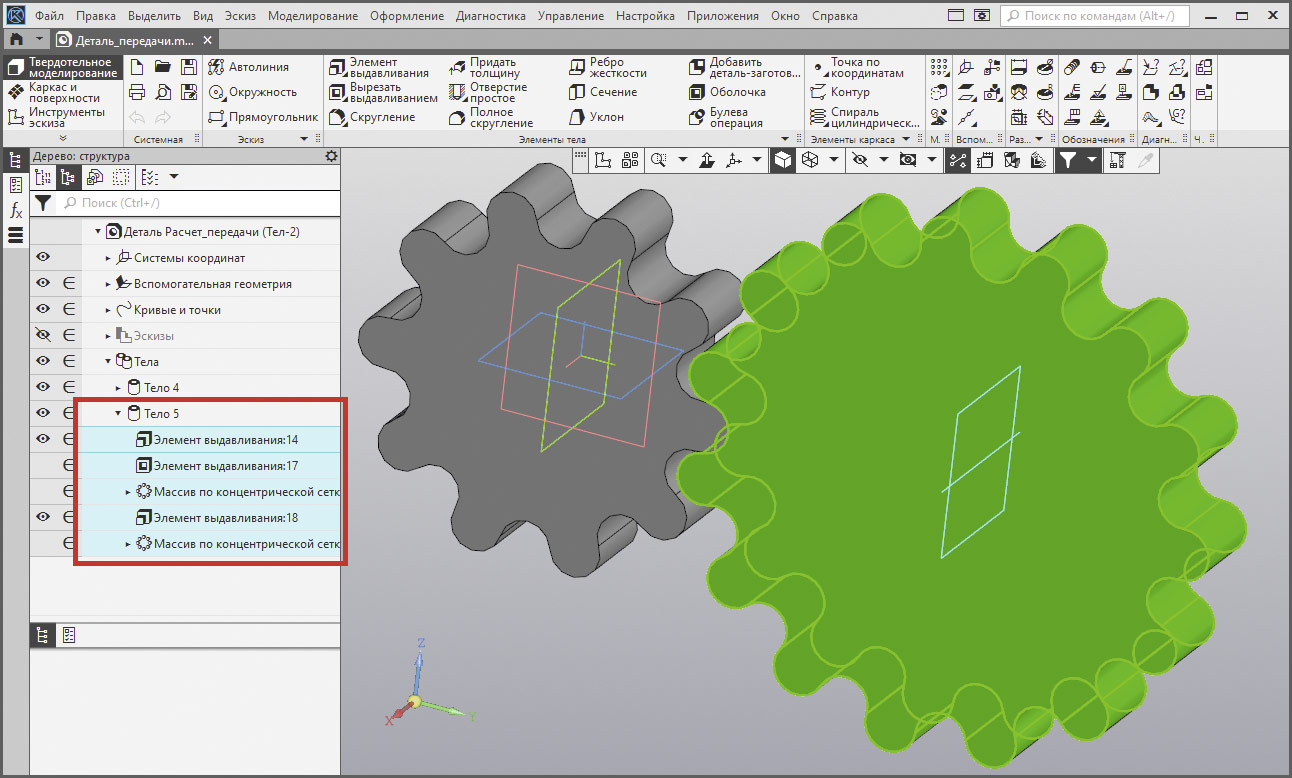
Рис. 5
Мы воссоздали облик передачи, состоящей из шестерни и колеса, в одном файле детали, ни на уровне спецификации, ни по физической достоверности не являющейся узлом-сборкой (взаимное вращение колес тут невозможно). Для перехода к сборке подготовим созданную деталь-прототип, предусмотрев в ней три варианта исполнения (кнопка Создать исполнение на панели Исполнения) — рис. 6. Первый вариант предполагается в качестве расчетного элемента, в нем будут доступны для редактирования все ключевые параметры передачи, а геометрия двух тел (шестерни и колеса), исключается из расчета и не отображается в рабочем поле. Второе исполнение создается на основе первого (переключатель Зависимое исполнение в диалоге Создать исполнение) и будет соответствовать шестерне — в нем исключается из расчета тело с геометрией колеса. Для колеса будет предназначено третье исполнение, создаваемое аналогично второму, только в нем исключается тело с геометрией шестерни.
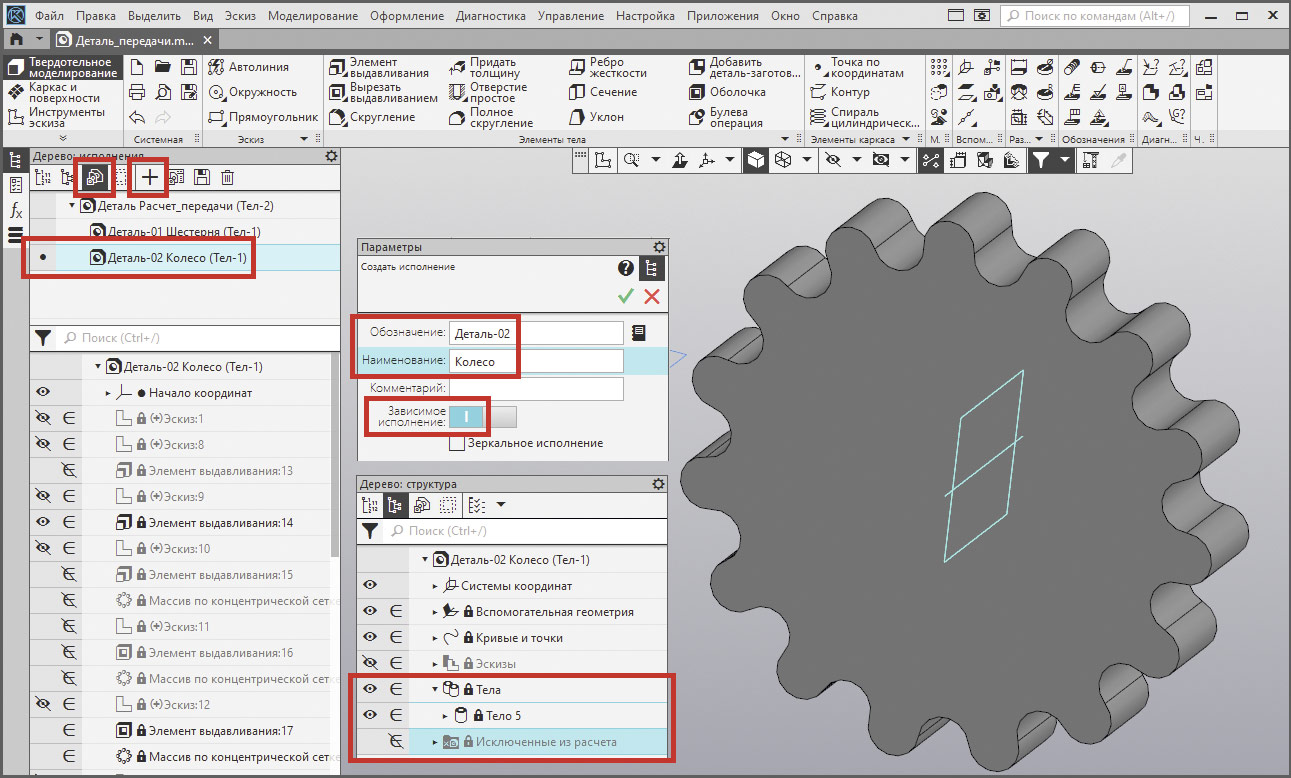
Рис. 6
В каждом исполнении будет фигурировать идентичный список параметров, поэтому при изменении первого (базового, родительского) актуализируется геометрия второго (шестерни) и третьего (колеса). Для удобства дальнейшего использования такой комбинированной детали в производных исполнениях имеет смысл установить для всех параметров атрибут Только чтение — редактировать передачу мы будем только из базового исполнения (рис. 7). Все расчетные параметры передачи, помимо этого, объявляются Внешними для того, чтобы их значениями можно было пользоваться (ссылаясь на них) в сборках, включающих данный компонент.
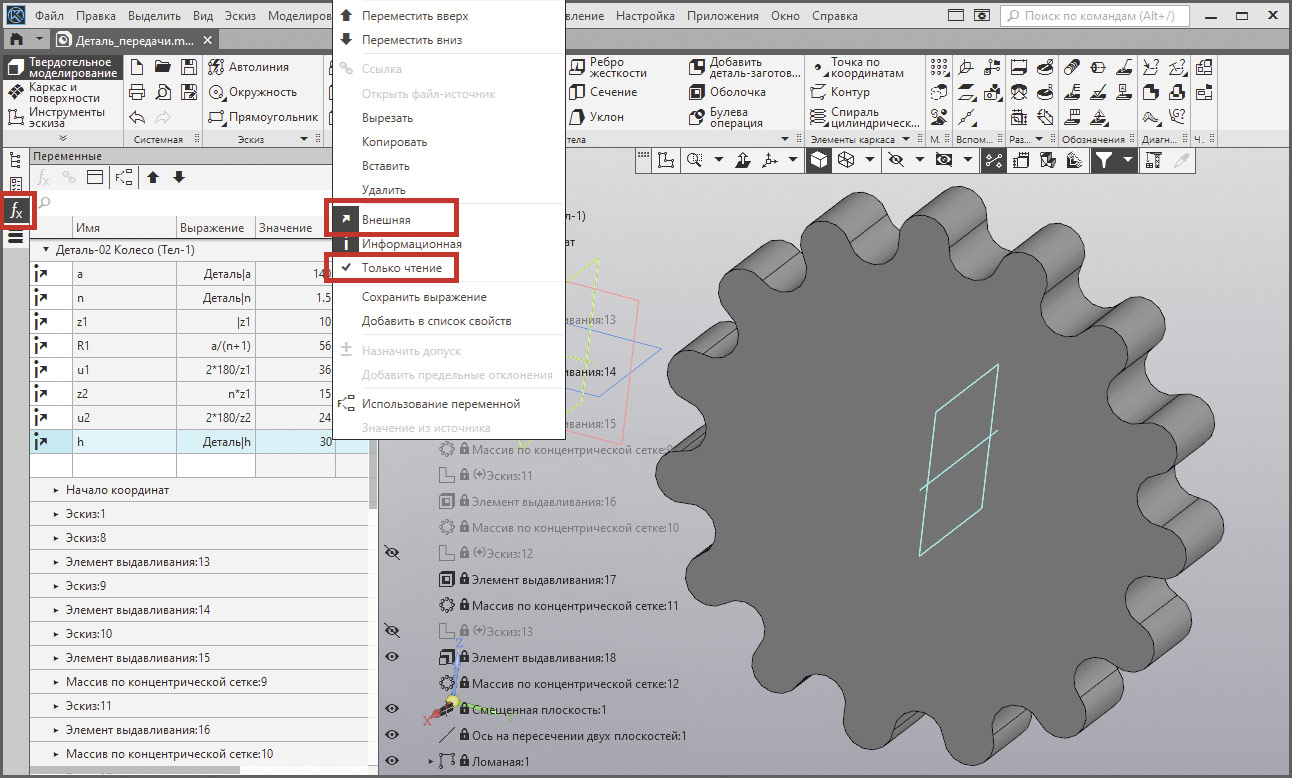
Рис. 7
Деталь-прототип готова, теперь ее можно использовать для создания передачи. В новый файл сборки добавим три экземпляра детали-прототипа, указывая для них представления «Расчета передачи», «Шестерни» и «Колеса» — рис. 8.
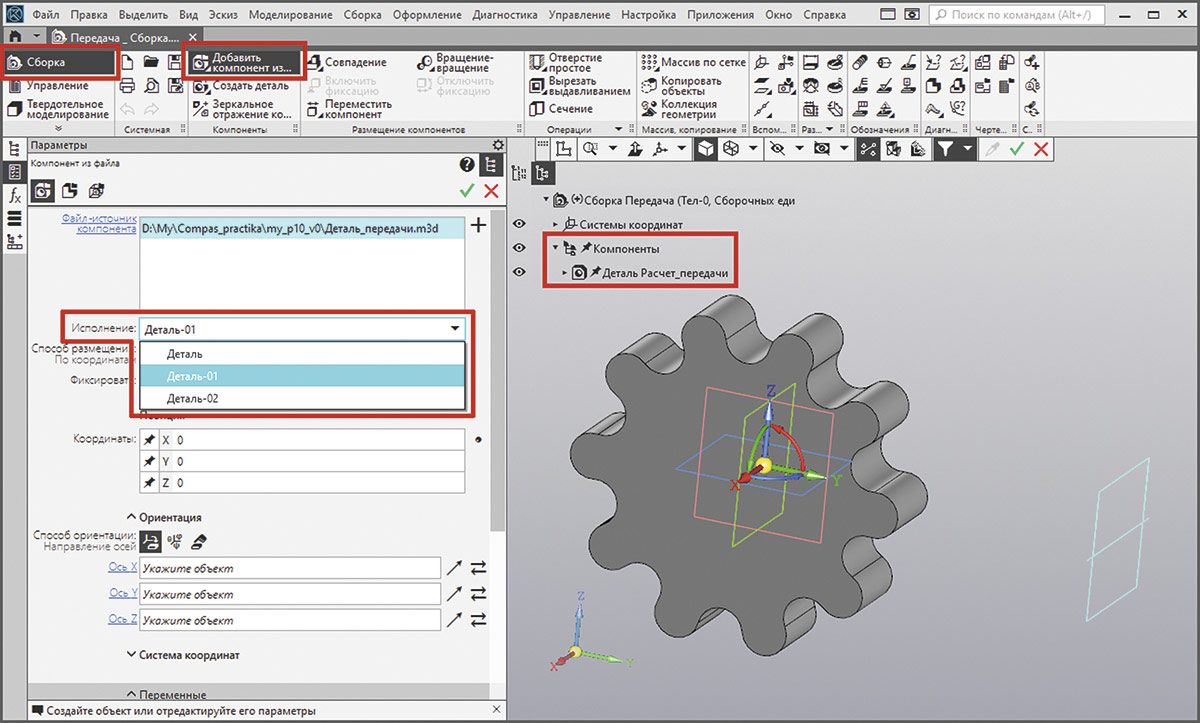
Рис. 8
Соединим детали сборки необходимыми статическими (Совпадение, Соосность, На расстоянии) и динамическими (Вращение-Вращение) сопряжениями (рис. 9). «Невидимую» деталь, соответствующую исполнению «Расчет передачи», можно зафиксировать в сборке и использовать ее для привязки «шестерни» и «колеса» (в частности, их осей). В качестве параметров сопряжений задействуем ссылочные переменные из детали-исполнения «Расчет передачи», например, для сопряжения Вращение-Вращение между «шестерней» и «колесом» укажем параметр передаточного отношения (v..n).
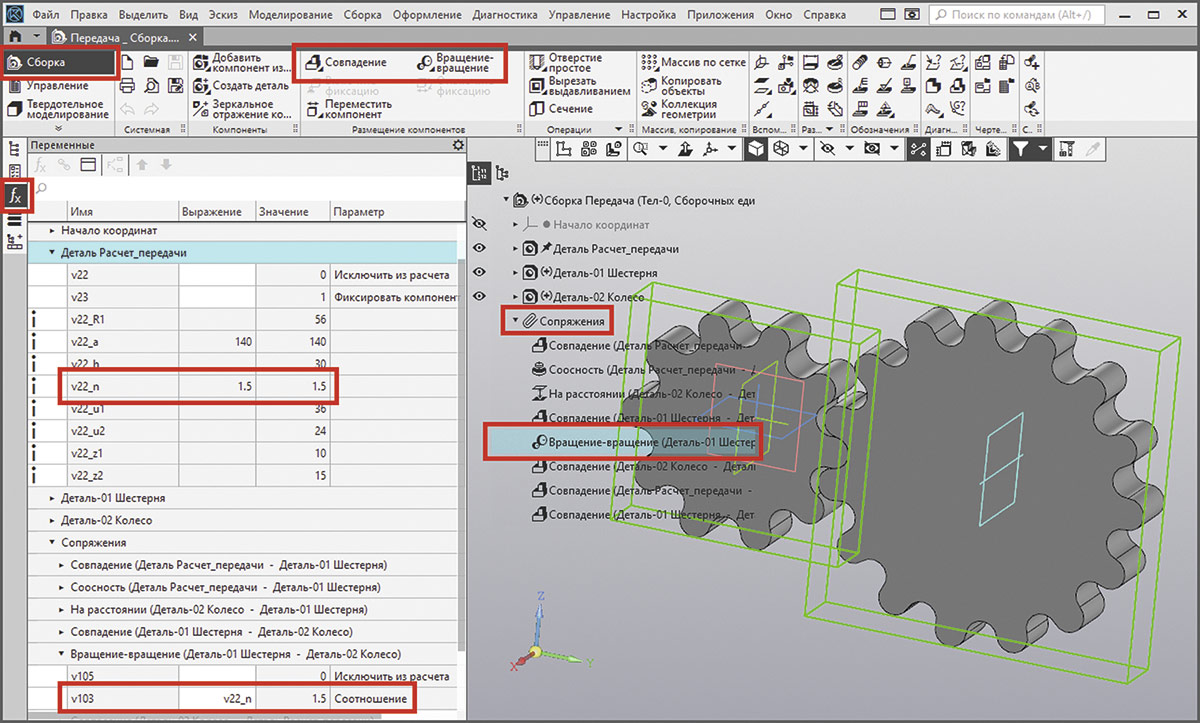
Рис. 9
Теперь можно приступить к тестированию узла передачи. Для этого вызовем команду Редактировать компонент на месте для детали-исполнения «Расчет передачи» — рис. 10.
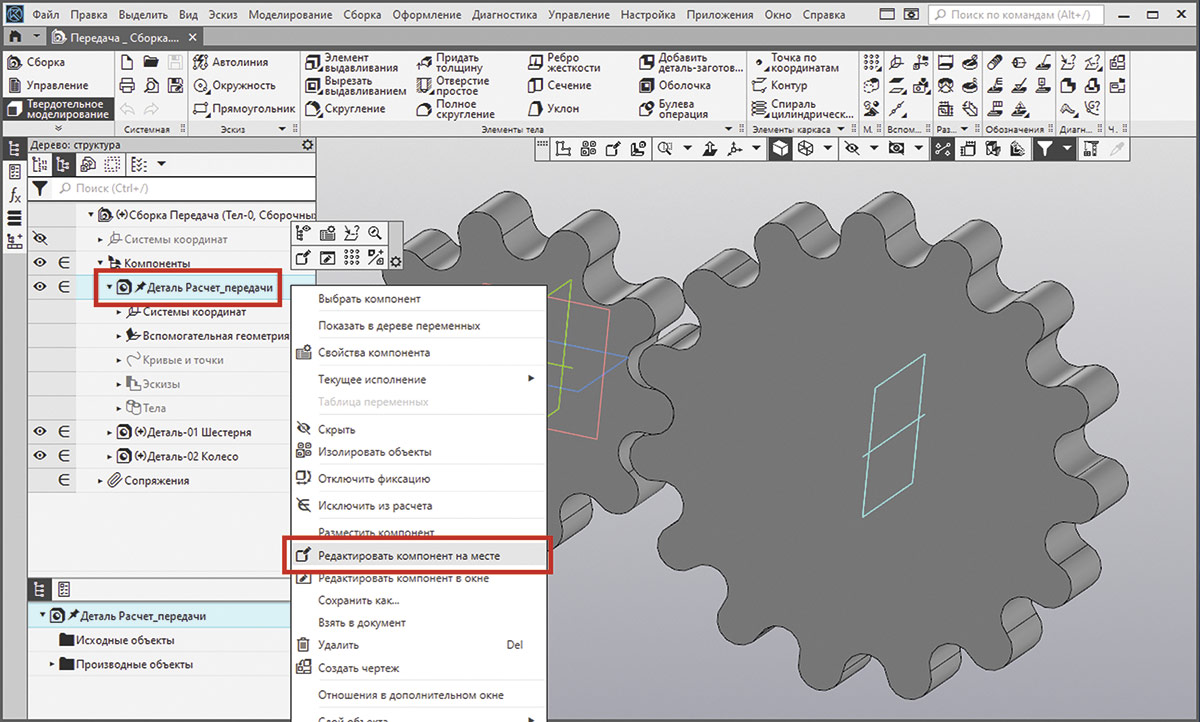
Рис. 10
На панели переменных изменим ключевые параметры передачи и вернемся в сборку из детали-прототипа (рис. 11).
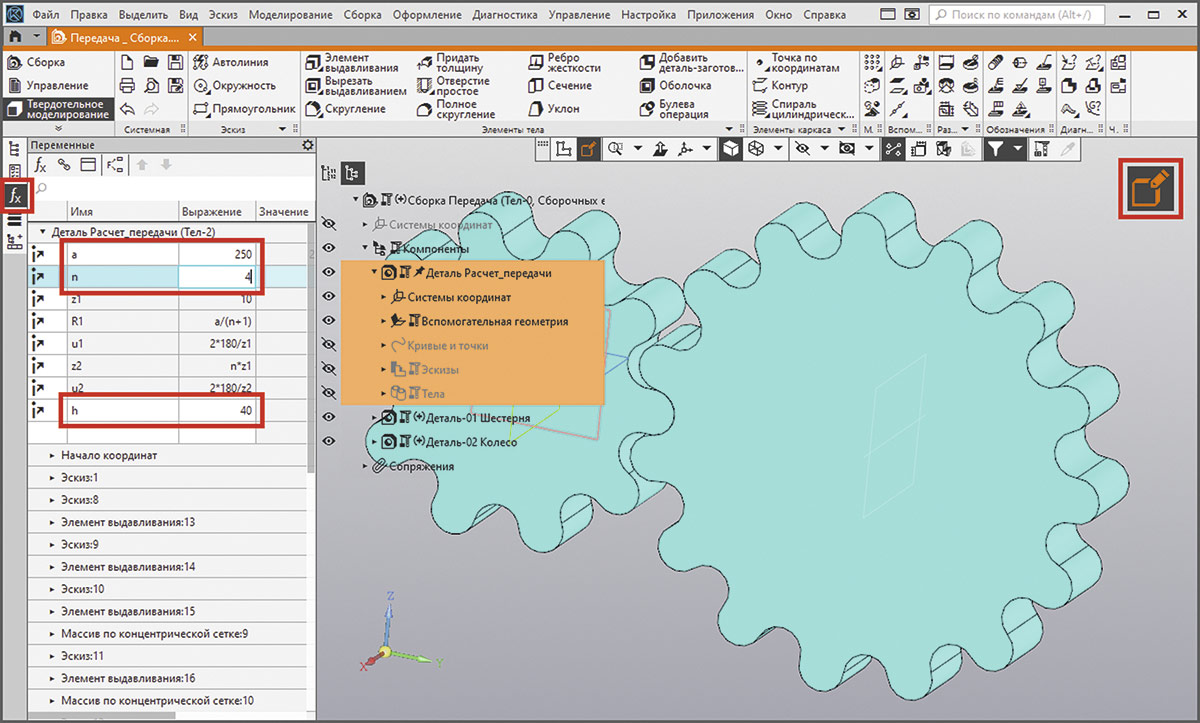
Рис. 11
Перестраиваем модель и наблюдаем изменение геометрии обеих деталей передачи (рис. 12). При условии правильного наложения связей и параметров в них также должно сохраняться корректное зацепление зубчатых колес.
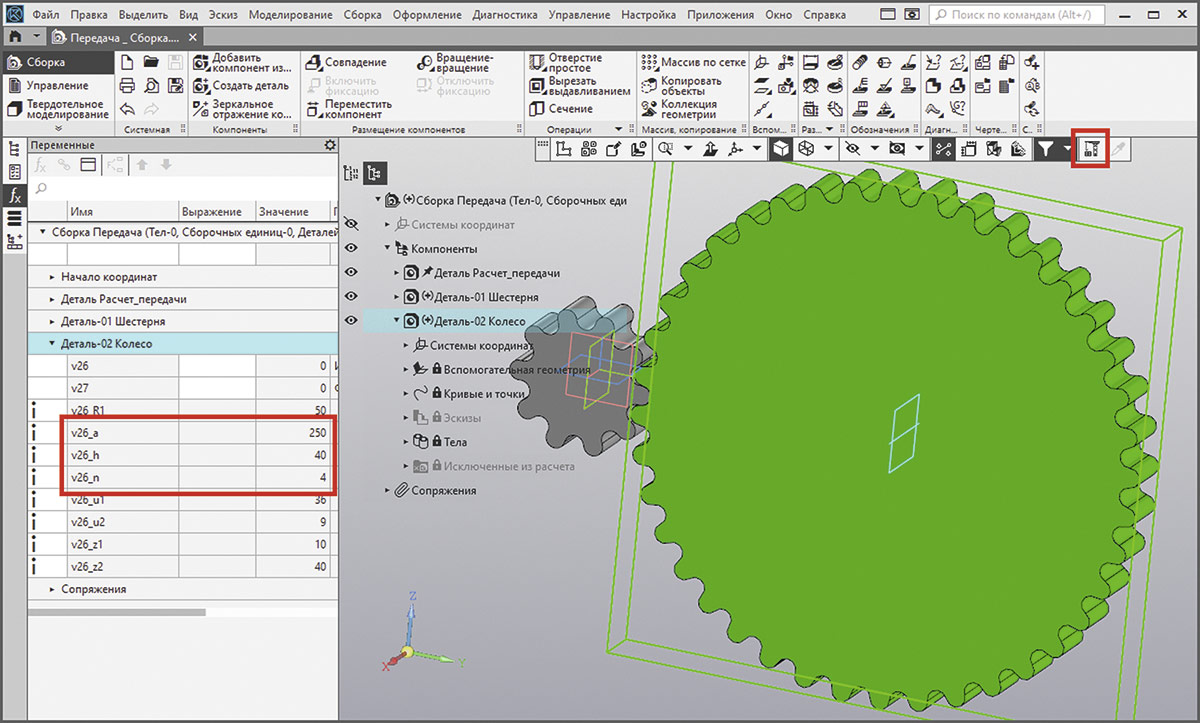
Рис. 12
Подвижность передачи можно проверить, исключив из расчета сопряжение, фиксирующее стартовое угловое положение колес, и применив команду Переместить/Повернуть компонент к одному из них (рис. 13).
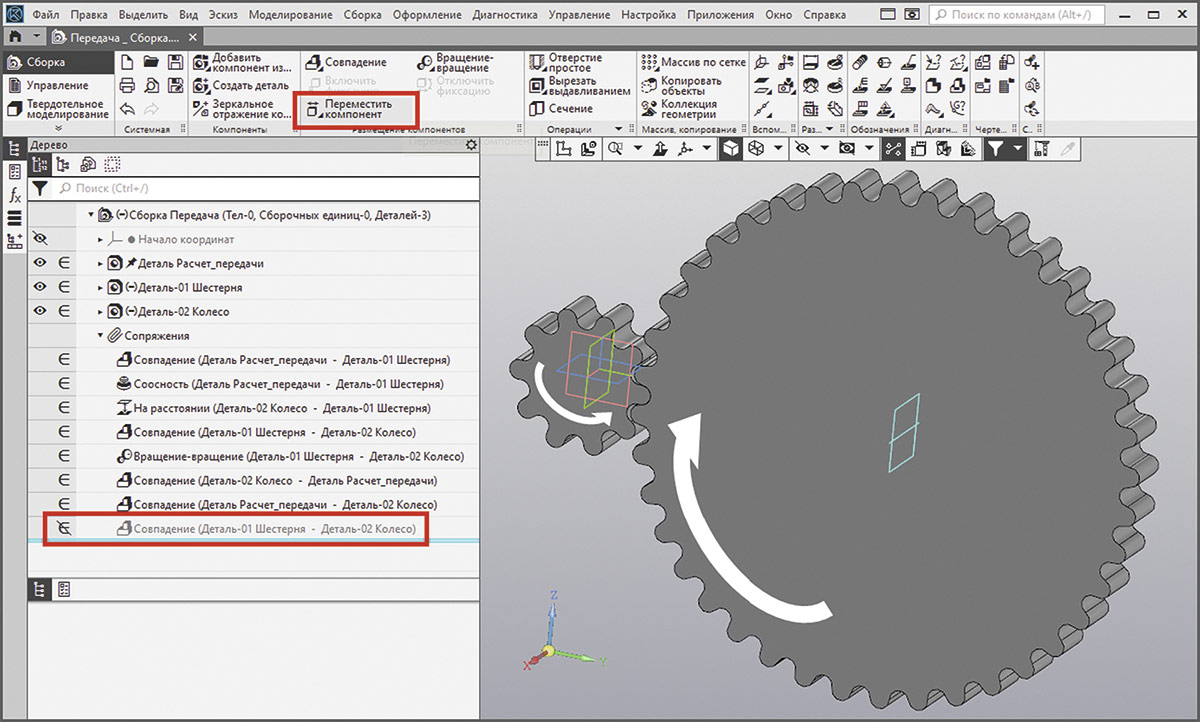
Рис. 13
Таким образом, поставленная задача решена — мы имеем сборку механической передачи, при редактировании параметров которой согласованно изменяется геометрия обеих деталей и сохраняется «работоспособность» узла [2]. Добавляя независимые экземпляры данной сборки в другие изделия, можно генерировать зубчатые пары с различными передаточными отношениями и межосевыми расстояниями. Конечно, заключенные в рассмотренной модели расчеты касаются только базовой геометрии (без учета всех физических условий), но, тем не менее, подобной ее структуры в виде двух файлов (непосредственно сборки и детали-прототипа) вполне можно было ожидать от встроенного в КОМПАС-3D модуля — генератора механических передач. Или, по крайней мере, получить на выходе деталь с двумя телами, представляющими пару зубчатых колес. Возможно, основанием для штатного варианта реализации генераторов передач является избегание разработчиками понятия «проекта» («каталога проекта») и не афиширование этого понятия в интерфейсе КОМПАС-3D, хотя находящиеся в отдельной папке файлы деталей и узлов надежно работают на уровне связи геометрии и параметров (с учетом относительных ссылок). Другой аспект, также тесно связанный с многоуровневыми сборками — это подвижность подсборок (узлов). Те же механические передачи весьма полезно проверить в контексте кинематики сложного изделия. Известие о появлении такого долгожданного функционала в КОМПАС-3D вселяет оптимизм в будущее отечественных разработок в области САПР [3].
Полезные ссылки:
- КОМПАС-3D — Система трехмерного моделирования // https://ascon.ru/products/7/review/?ysclid=l45t5bihb8303553434
- Проект рассмотренной в материале механической передачи // https://disk.yandex.ru/d/8Y5imBn5aV-I1A
- Саляхутдинов Р. КОМПАС-3D v21 Подвижные Подсборки //https://saprblog.ru/uroki-kompas-3d/kompas-3d-v21-podvizhnye-podsbor

