

Алексей Просолович,
к.т.н., ведущий аналитик по направлению инженерного анализа, АО «Топ Системы»
В данной статье описан программный продукт T-FLEX Динамика от компании «Топ Системы», рассмотрен вопрос реализации методик проектирования механизмов в среде CAD/CAE, приведен пример решения задачи анализа динамики механизма, показывающий практическую ценность модуля T-FLEX Динамика.
Программный продукт T-FLEX Динамика
T-FLEX Динамика относится к классу расчетных программ моделирования многотельной динамики (MultiBody Dynamics) и предназначена для качественного и количественного анализа кинематики и динамики пространственных механических систем. Программный продукт является дополнительным приложением параметрической системы T-FLEX CAD (рис. 1) и функционирует на единой платформе T-FLEX PLM. Это обеспечивает полную ассоциативность расчетных данных с единой моделью данных, позволяет использовать единые механизмы платформы, в том числе общие принципы организации пользовательского интерфейса.
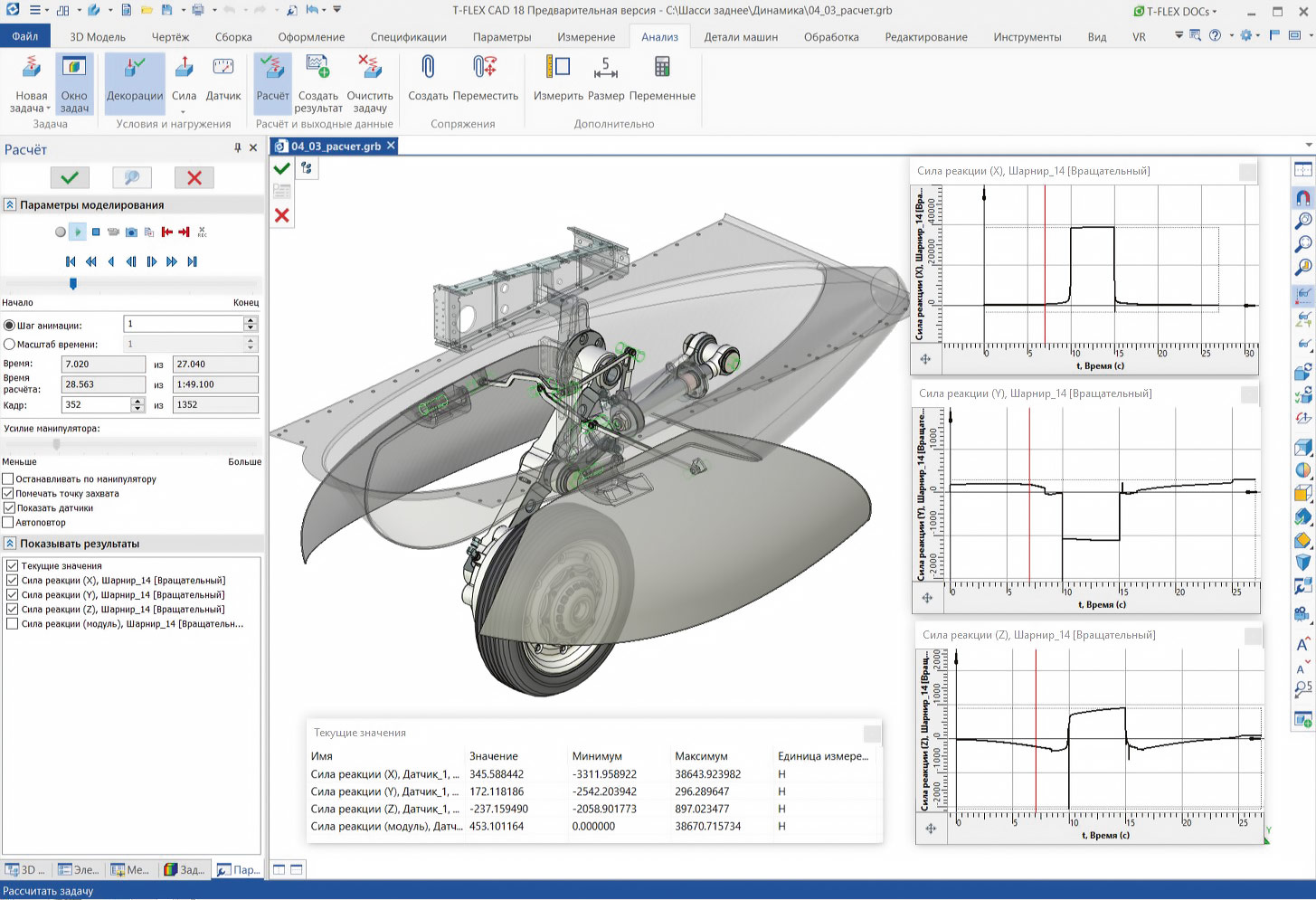
Рис. 1. Пример расчета в программном продукте T-FLEX Динамика
Особенностями программы T-FLEX Динамика являются автоматическое создание кинематических связей на основе сопряжений, а также реалистичное моделирование контактов между элементами расчетной модели.
T-FLEX Динамика позволяет проводить следующие виды расчетов:
- определение траекторий движения, скоростей и ускорений произвольных точек механической системы под действием сил;
- анализ временных характеристик механической системы (время прихода в целевую точку, время затухания колебаний и др.);
- расчет сил взаимодействия между элементами системы, возникающих в процессе движения (сил реакции в опорах, шарнирах и др.).
Программа предназначена для инженеров-конструкторов.
Реализация методик проектирования механизмов в среде CAD/CAE
Компания «Топ Системы» предлагает комплекс профессиональных систем, используемых для различных расчетов и анализа изделий.
T-FLEX CAD совместно с расчетными системами T-FLEX Динамика, T-FLEX Анализ и приложением T-FLEX Детали машин обеспечивает полноценное проектирование механизмов в среде CAD/CAE.
В качестве примера рассмотрим методику проектирования рычажного механизма. В таблице приведены задачи и этапы типовой методики проектирования рычажного механизма с учетом их реализации в комплексе T-FLEX PLM.
Задачи и этапы проектирования рычажного механизма в среде CAD/CAE
№ |
Теоретическая механика |
CAD/CAE |
|
Задача |
Этап |
||
1 |
Синтез кинематики |
Производится синтез кинематической схемы (определяются длины и положения звеньев по заданным условиям) |
T-FLEX CAD |
2 |
Анализ кинематики и динамики |
Принимается упрощенный закон движения входного звена, определяются скорости и ускорения звеньев, производится приближенный силовой расчет (определяются реакции в кинематических парах) |
T-FLEX Динамика |
3 |
3D-моделирование, |
По найденным условиям выполняется расчет прочности, подбираются сечения звеньев и определяются их массы |
T-FLEX CAD, |
4 |
Анализ кинематики и динамики |
Производится приведение сил и масс, подбор маховика и определение истинного закона движения звена приведения. |
- |
5 |
Анализ кинематики и динамики, |
При найденном законе движения звена приведения находятся уточненные значения скоростей и ускорений, определяются более точные величины реакций и производится проверка прочности и жесткости звеньев. Размеры сечений и массы последовательно уточняются |
T-FLEX CAD, T-FLEX Анализ |
При реализации методики проектирования в среде CAD/CAE важным является вопрос геометрического описания изделия.
На начальных этапах геометрическая модель создается упрощенной, но достаточной для выполнения расчетов текущего этапа. Это обусловлено необходимостью снижения трудоемкости проектирования при сравнении различных возможных вариантов решения. На последующих этапах полученные в результате предыдущего расчета данные используются для обоснованного уточнения модели изделия.
Кроме того, сегодня необходимыми требованиями являются использование ассоциативных связей между геометрическими моделями на различных этапах проектирования, а также параметризация, необходимые для гибкого и многовариантного процесса проектирования.
T-FLEX CAD реализует расширенные параметрические возможности 2D- и 3D-моделирования и хорошо подходит для проектирования с учетом ассоциативности и параметризации.
В соответствии с принципом сквозного проектирования, на рис. 2 показаны связи этапов проектирования и геометрических моделей с различными видами инженерных расчетов.
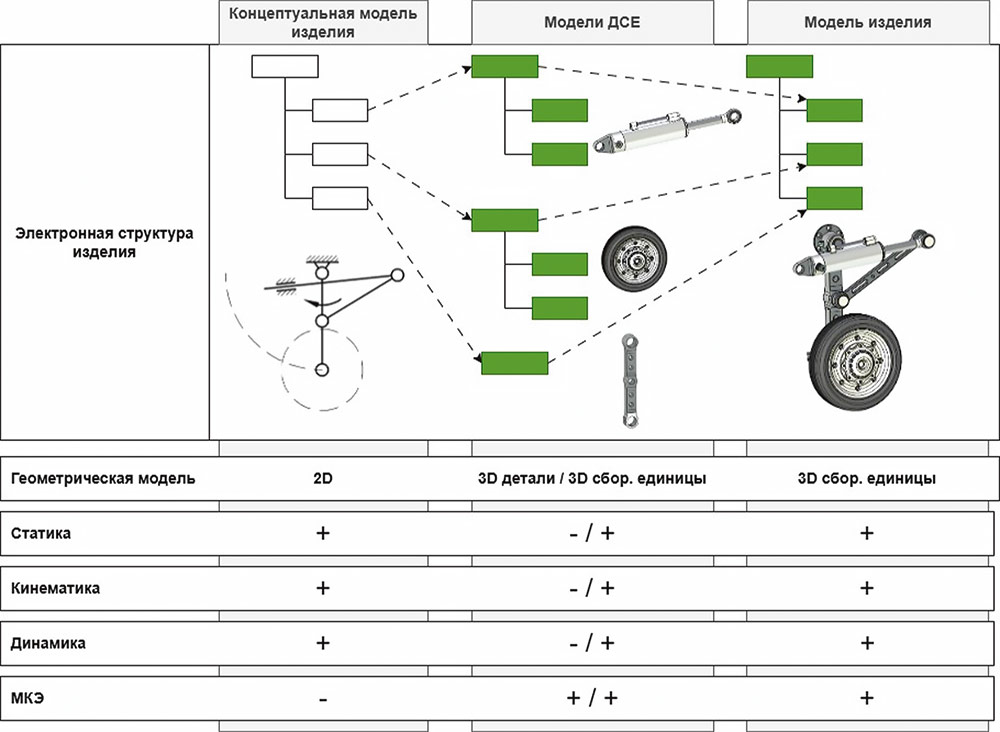
Рис. 2. Связи этапов проектирования и моделей с различными видами инженерных расчетов
Пример расчета механизма в T-FLEX Динамика
На рис. 3 показан механизм выпуска-убирания основной опоры шасси БПЛА, анализ кинематики и динамики которого может быть выполнен в T-FLEX Динамика.
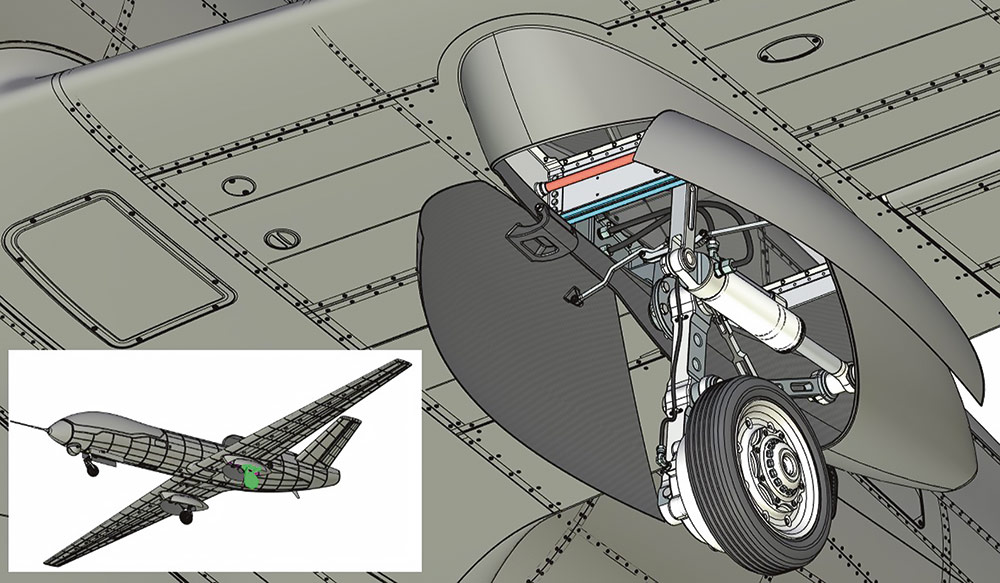
Рис. 3. Механизм основной опоры шасси
Исходная модель опоры представляет собой узловую сборочную модель. Механизм выпуска-убирания опоры является рычажным механизмом с гидроцилиндром в качестве ведущего звена.
Задача — смоделировать динамику убирания-выпуска шасси.
Моделирование механики движения в T-FLEX Динамике состоит из этапов, приведенных на рис. 4.
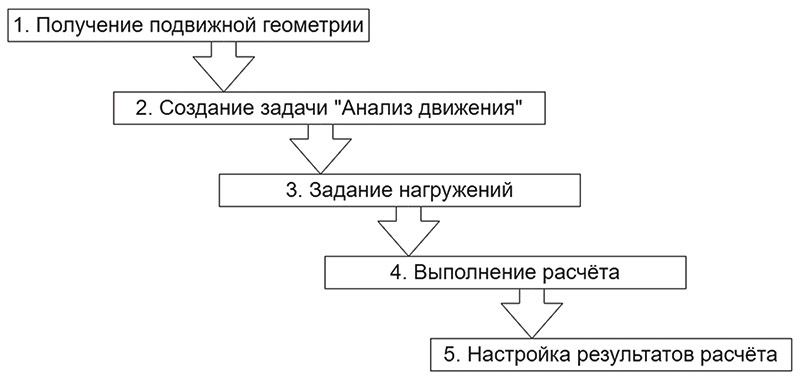
Рис. 4. Последовательность моделирования механики движения в T-FLEX Динамике
Получение подвижной геометрии
В T-FLEX CAD исходная сборочная модель может быть построена в варианте неподвижной геометрии. Поэтому на первом этапе необходимо получить подвижную геометрию. Для этого используем различные виды сопряжений и добавление степеней свободы для 3D-фрагментов.
В состав анализируемого устройства добавляем рычаги щитков (рис. 5) и базовые элементы конструкции для закрепления стойки, цилиндра и щитков.
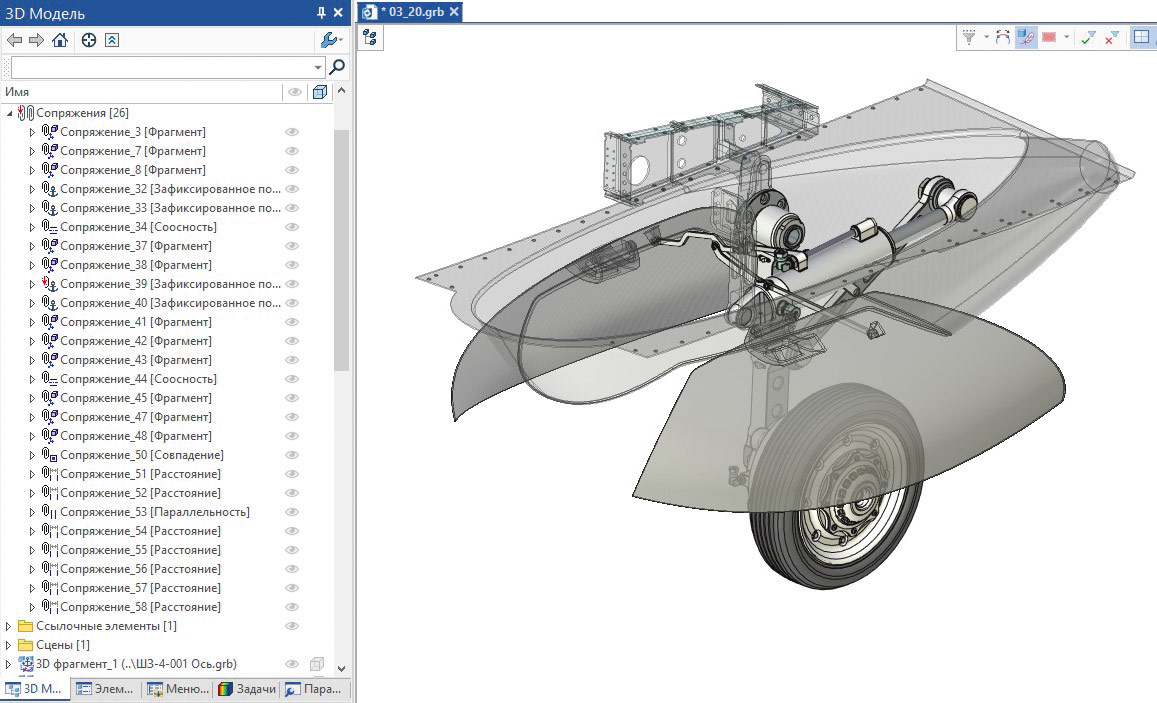
Рис. 5. Подвижная сборочная модель
Создание задачи и настройка моделирования
На втором этапе создадим задачу (рис. 6 и 7):
- Указываем тип задачи.
- Выбираем элементы расчетной модели — 3D-фрагменты.
- Указываем режим анализа контактов.
Далее задаем основные параметры задачи (рис. 7).
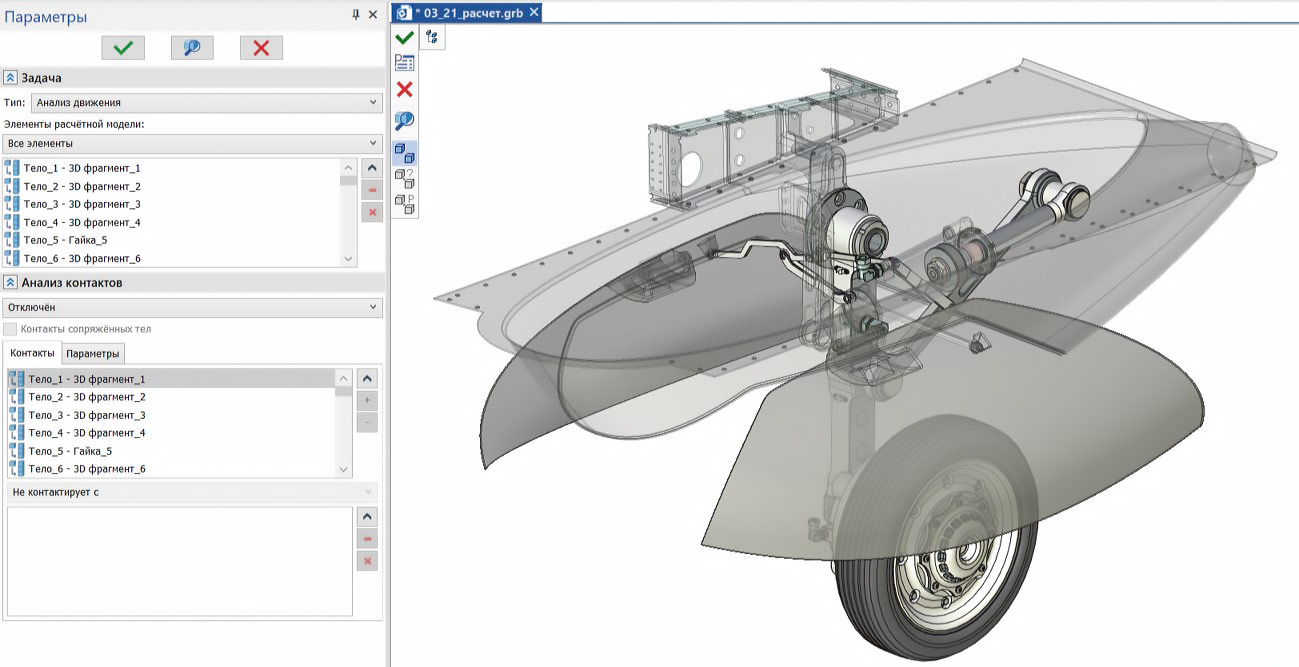
Рис. 6. Создание задачи Анализ движения
После создания задачи Анализ движения в окне Задачи появятся автоматически созданные шарниры и элементы расчетной модели. На модели выводятся декорации для обозначения шарниров (рис. 8).
Задание нагружений
В T-FLEX Динамике доступны различные нагружения — кинематические и силовые (рис. 9). Величина нагружения может задаваться числом или графиком.
Гравитация задается в параметрах на всю задачу (см. рис. 7).
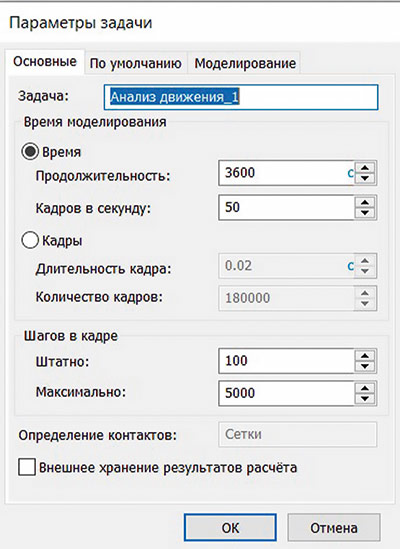
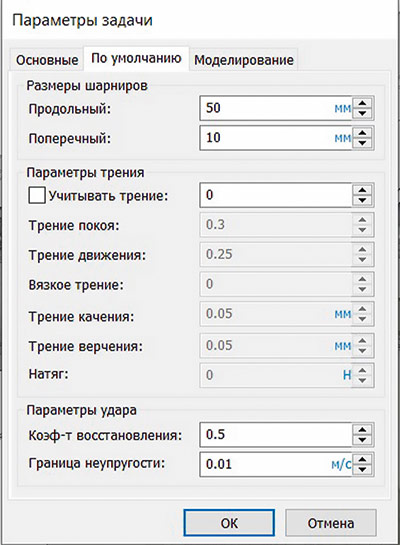
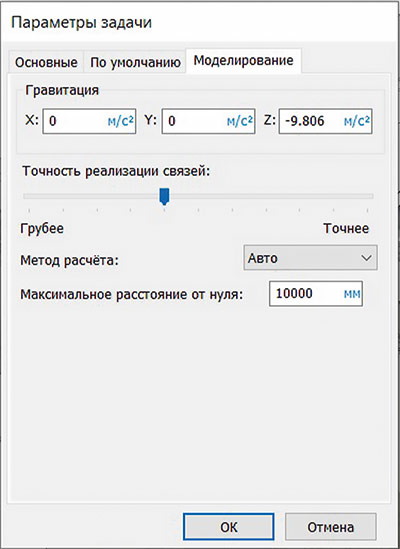
Рис. 7. Задание параметров задачи Анализ движения
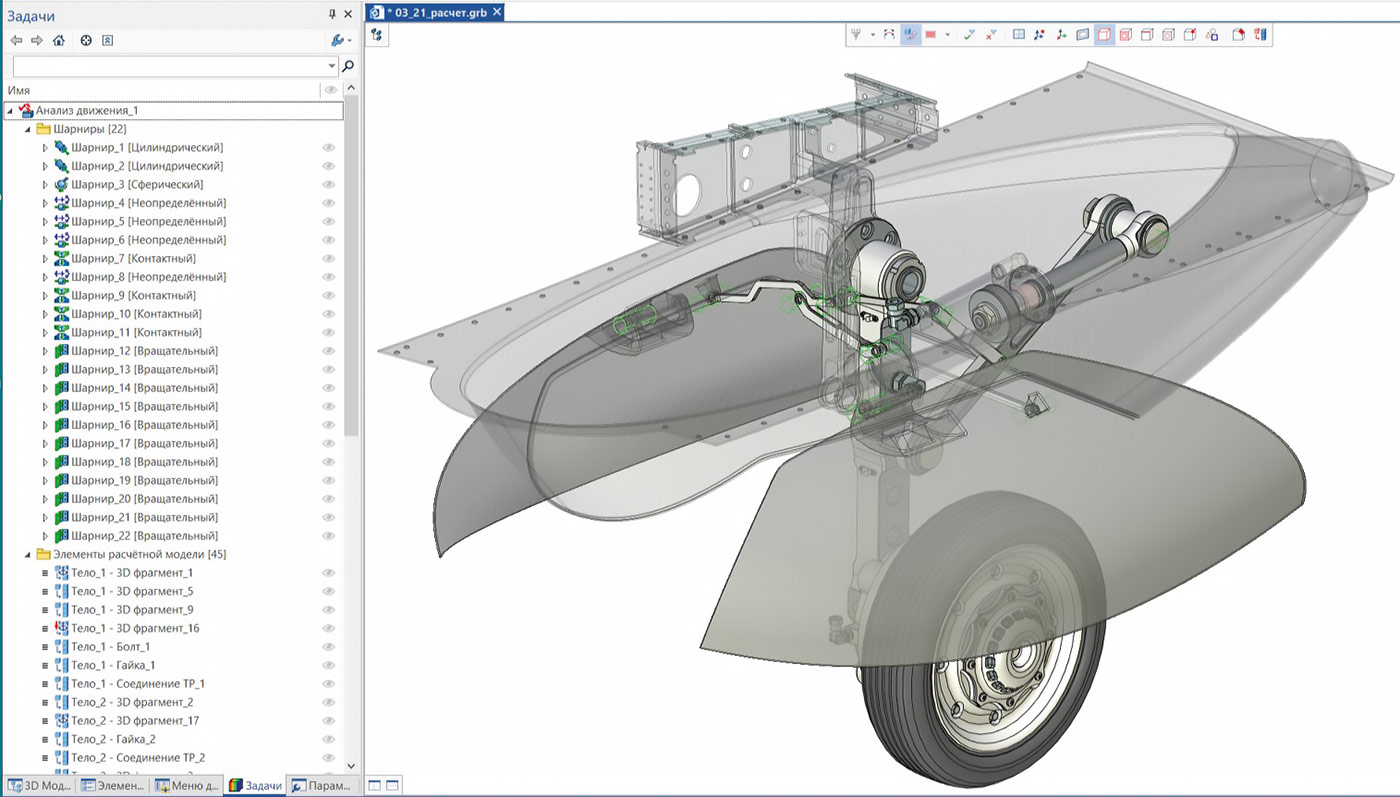
Рис. 8. Шарниры и элементы расчетной модели в окне задачи
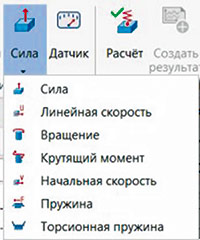
Рис. 9. Виды нагружений
Для гидроцилиндра в рассматриваемом примере зададим нагружение Пружина в варианте Линейный привод с использованием графика зависимости расстояния от времени (рис. 10).
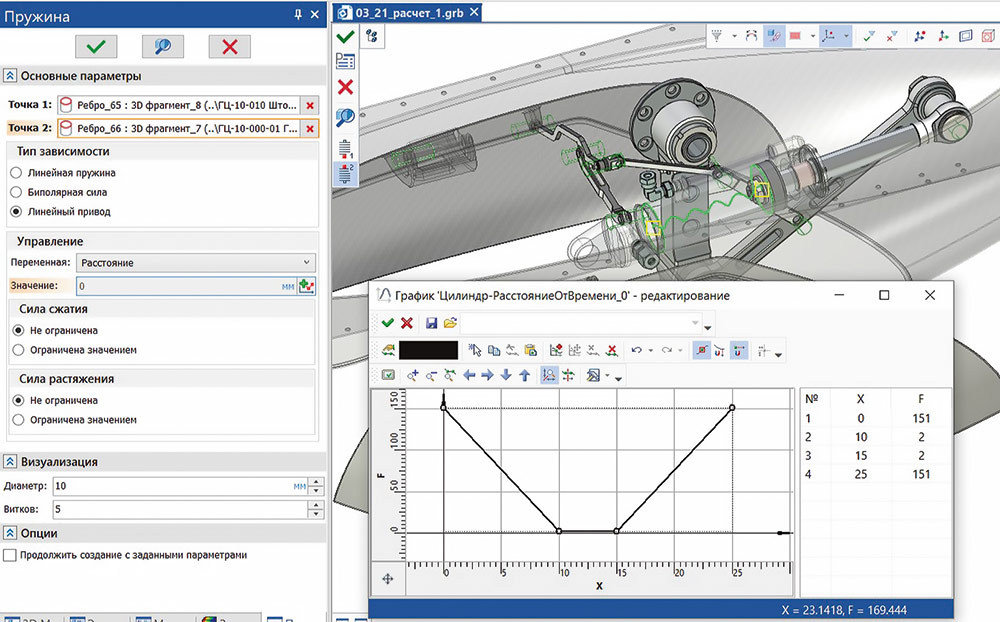
Рис. 10. Задание нагружения Пружина — Линейный привод с использованием графика
В окне Задачи появится нагружение (рис. 11).
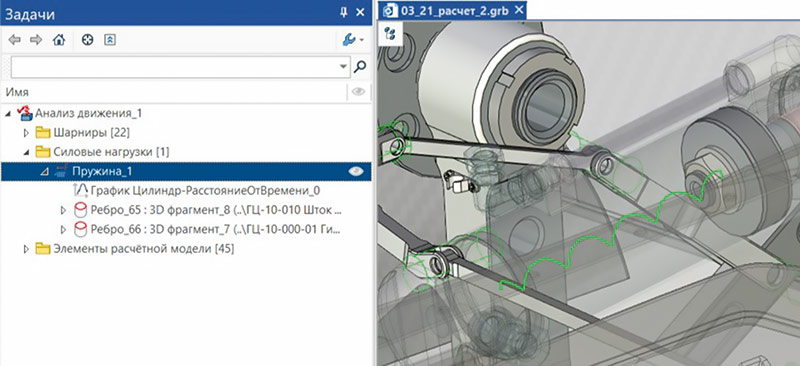
Рис. 11. Нагружение в окне Задачи и отображение Задачи на модели
Выполнение расчета
В процессе выполнения расчета можно наблюдать за поведением модели с любой точки. Результаты анализа сохраняются в задаче Анализ движения и могут быть проиграны системой в любой момент времени без необходимости повторного расчета (рис. 12).
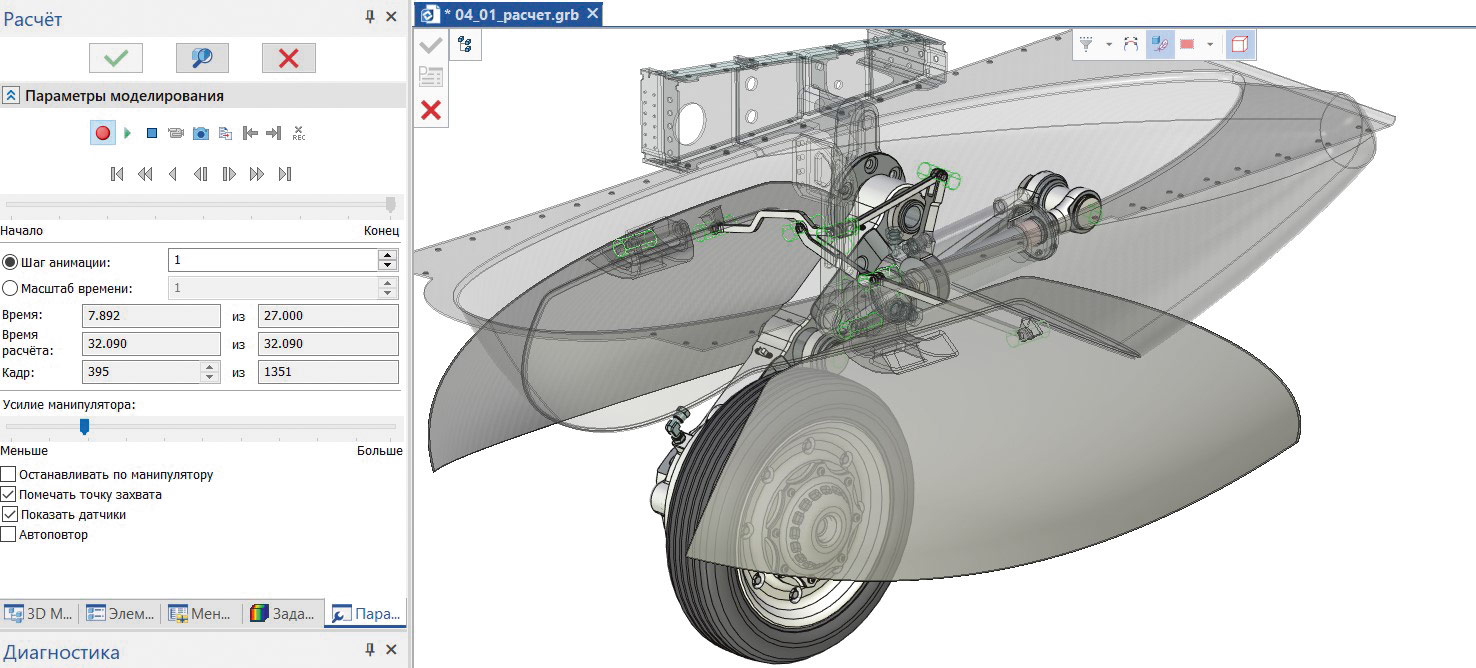
Рис. 12. Выполнение расчета
После выполнения расчета при выявлении ошибок и неточностей динамической модели необходимо выполнить доработку и уточнение модели.
Это может быть реализовано добавлением или изменением сопряжений и степеней свободы 3D-фрагментов. При этом шарниры будут автоматически добавлены или изменены. Также возможно изменение геометрических параметров и положений 3D-фрагментов. Ассоциативность геометрической и расчетной моделей позволяет это выполнять прозрачно и на любом этапе работы с задачей Анализ движения.
Затем необходимо повторить расчет задачи и, выполняя данные итерации, добиться требуемой точности и адекватности моделирования.
Визуализация результатов расчета
При визуализации результатов используются специальные объекты задачи: датчики и результаты.
Датчик — объект задачи, предназначенный для считывания и передачи результатов расчета на средства отображения результатов. Датчики могут быть нескольких типов, в зависимости от объекта измерения.
Результаты — специальные объекты задачи, предназначенные для считывания показаний датчиков в ходе динамического расчета.
Для получения графиков линейной скорости штока, угловой скорости основного звена опоры, углов поворота щитков создадим датчики типа Тело (рис. 13).
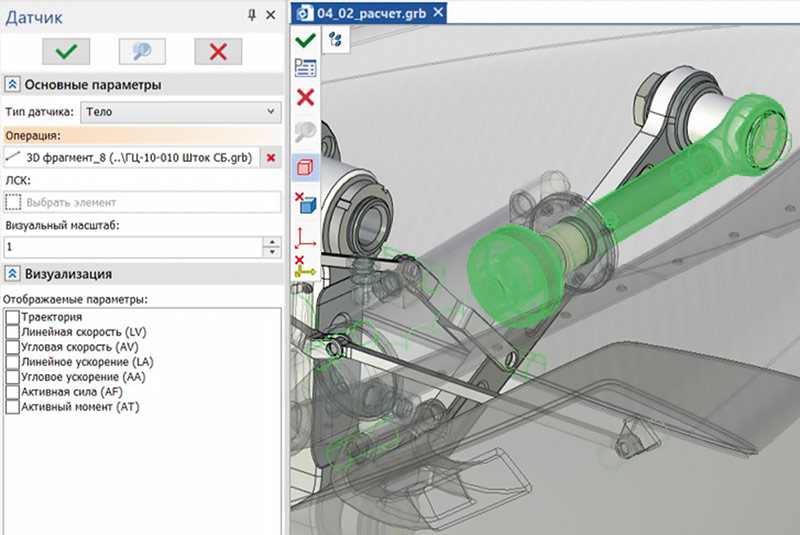
Рис. 13. Создание датчика типа Тело
После создания датчиков они появятся в окне Задачи (рис. 14).
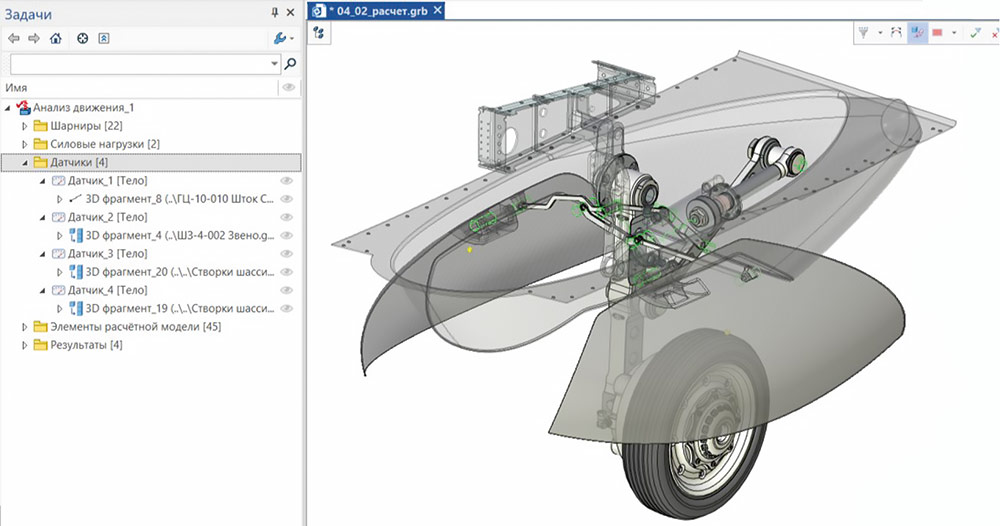
Рис. 14. Датчики типа Тело в окне Задачи и их отображение на модели
На основе созданных ранее датчиков создадим результаты (рис. 15).
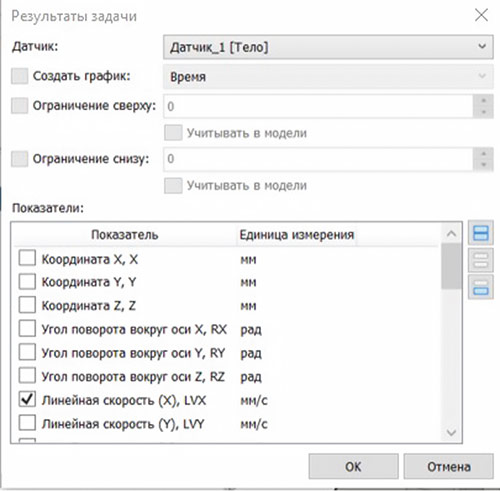
Рис. 15. Создание объекта Результат по датчику Тело
После создания результатов они появятся в окне Задачи (рис. 16).
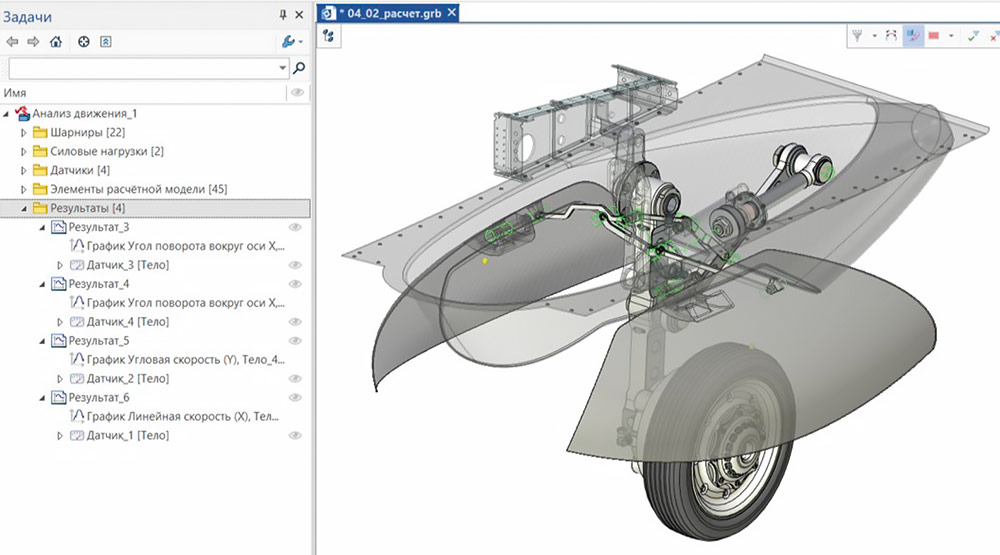
Рис. 16. Результаты по датчикам в окне Задачи
При запуске задачи происходит проигрывание результатов расчета с выводом графиков (рис. 17).
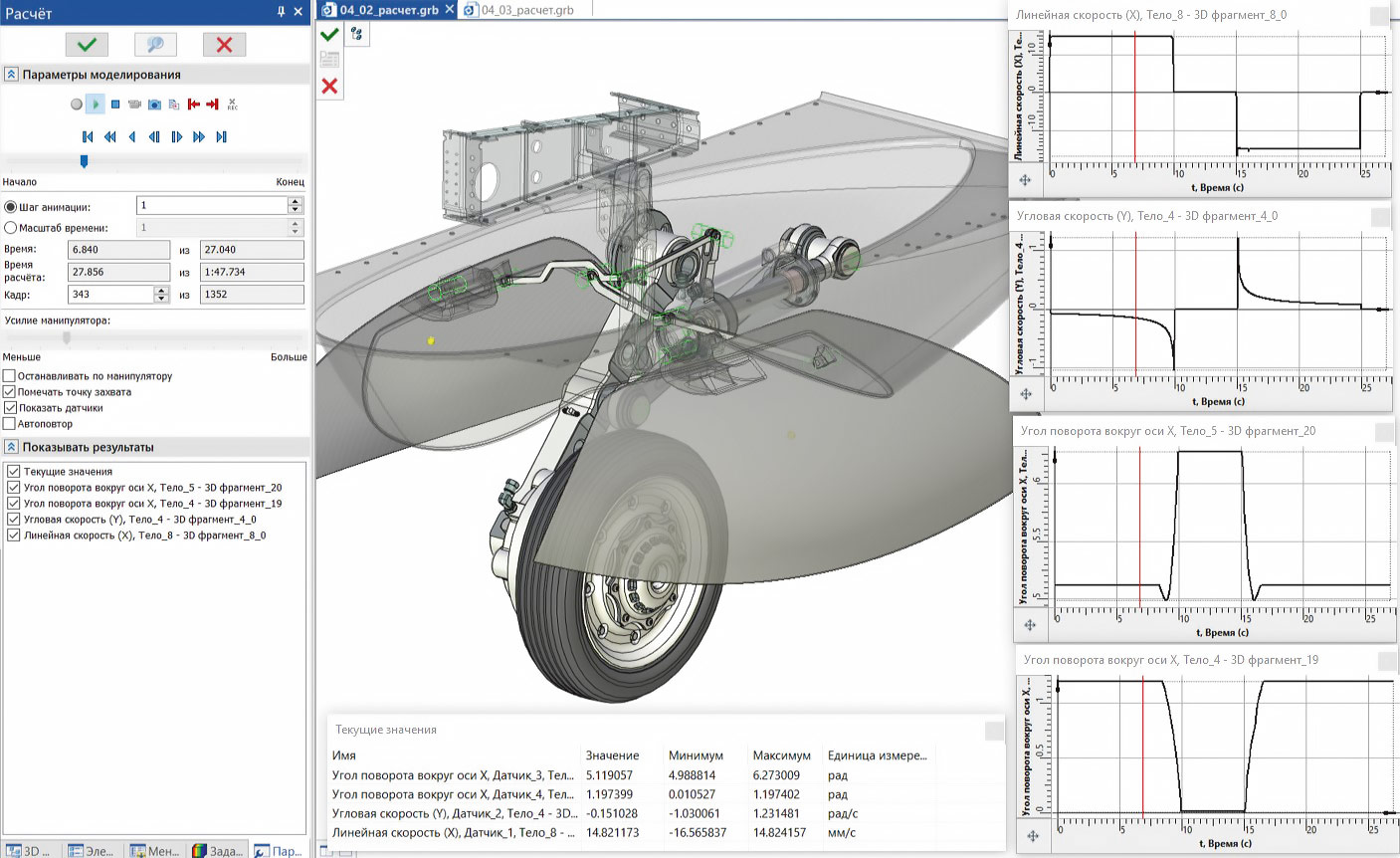
Рис. 17. Вывод графиков при запуске задачи
Для получения графиков сил реакции в шарнире оси опоры создадим датчики типа Шарнир (рис. 18).
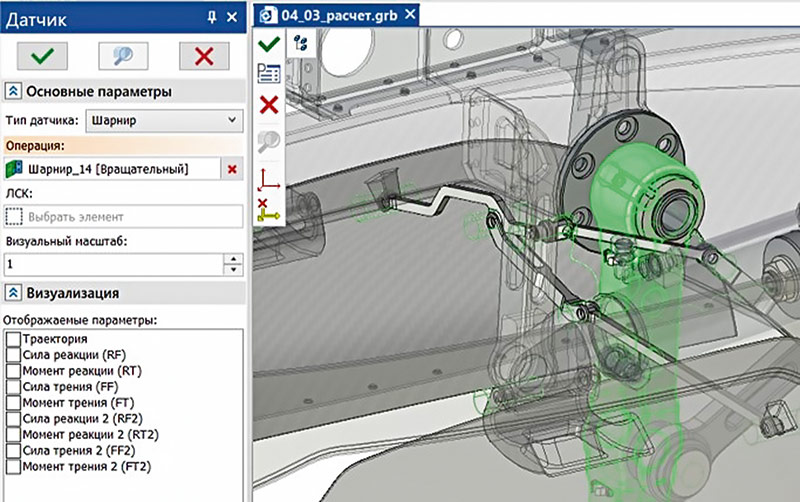
Рис. 18. Создание датчика типа Шарнир
На основе созданного ранее датчика создадим результаты для сил реакций (рис. 19).
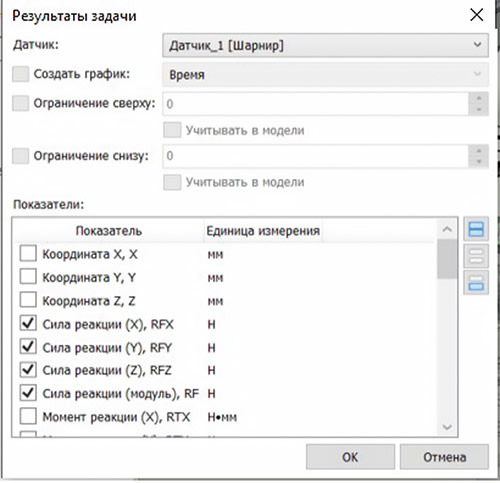
Рис. 19. Создание объектов Результат по датчику Шарнир
При запуске задачи происходит проигрывание результатов расчета с выводом графиков (рис. 20).
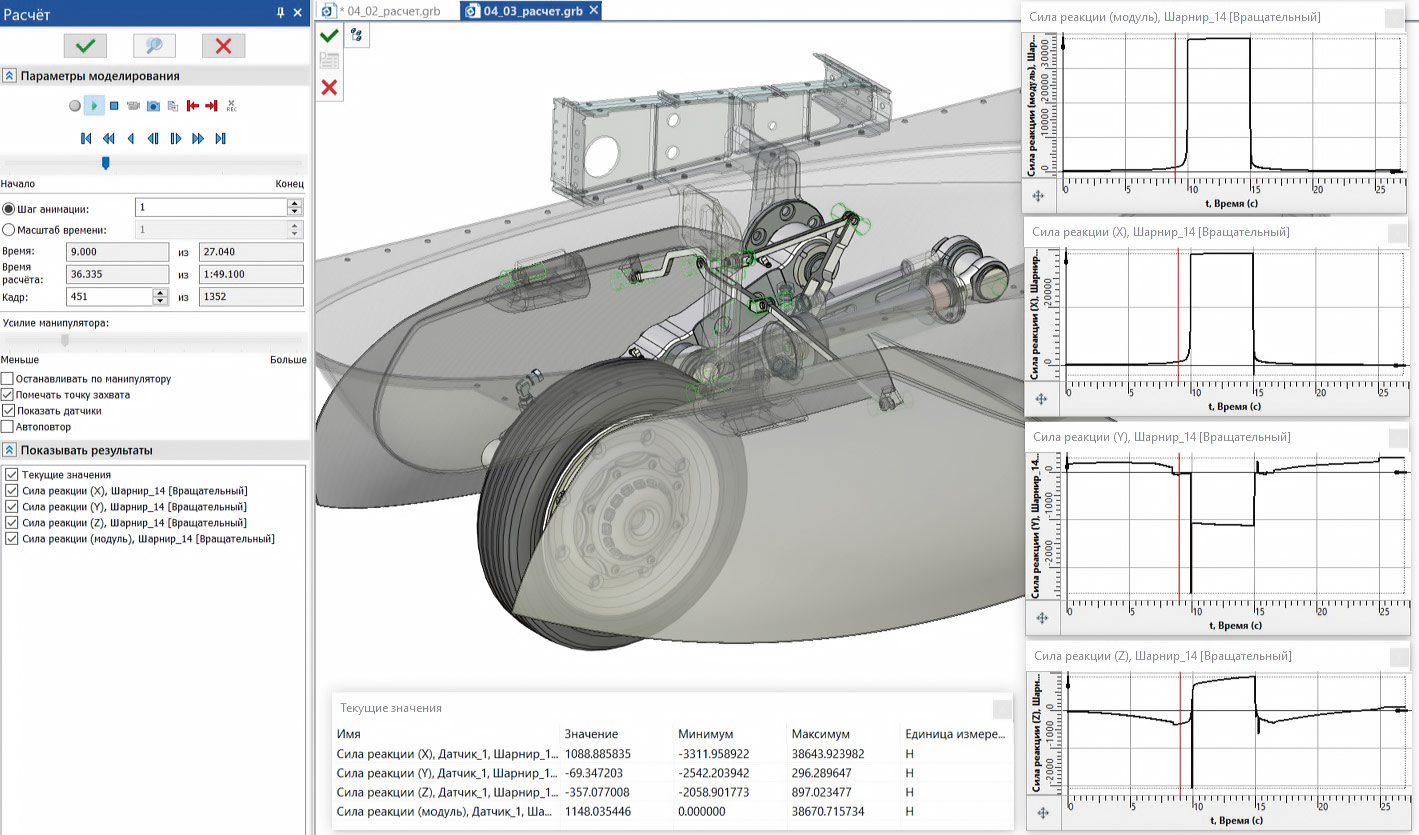
Рис. 20. Вывод графиков сил реакций при запуске задачи
С помощью датчика типа Точка можно визуализировать траекторию, векторы скорости и ускорения в 3D.
Для получения траектории движения создадим датчики типа Точка и укажем в параметрах визуализации отображение траектории и вектора скорости (рис. 21).
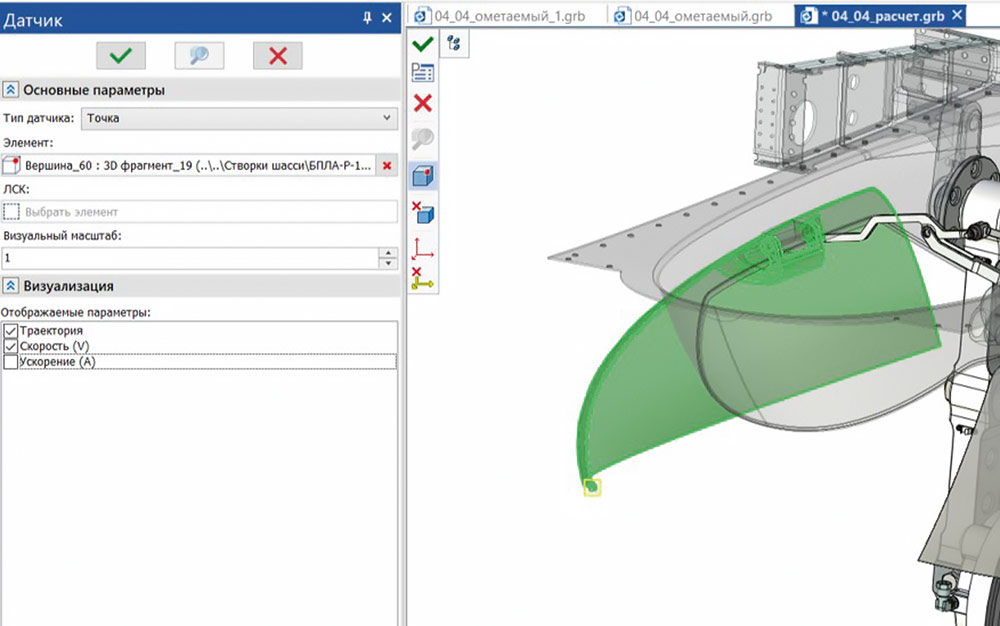
Рис. 21. Создание датчика типа Точка
При запуске задачи происходит проигрывание результатов расчета с выводом траектории и вектора скорости в пространстве модели (рис. 22).
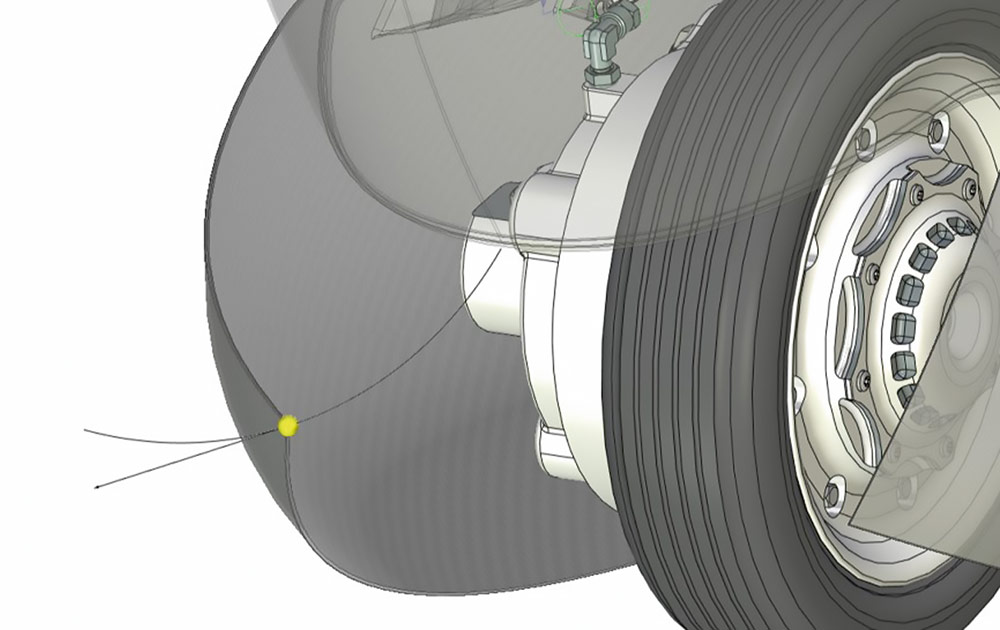
Рис. 22. Визуализация траектории и вектора скорости в пространстве модели
По траектории можно создать 3D-кривую (рис. 23).
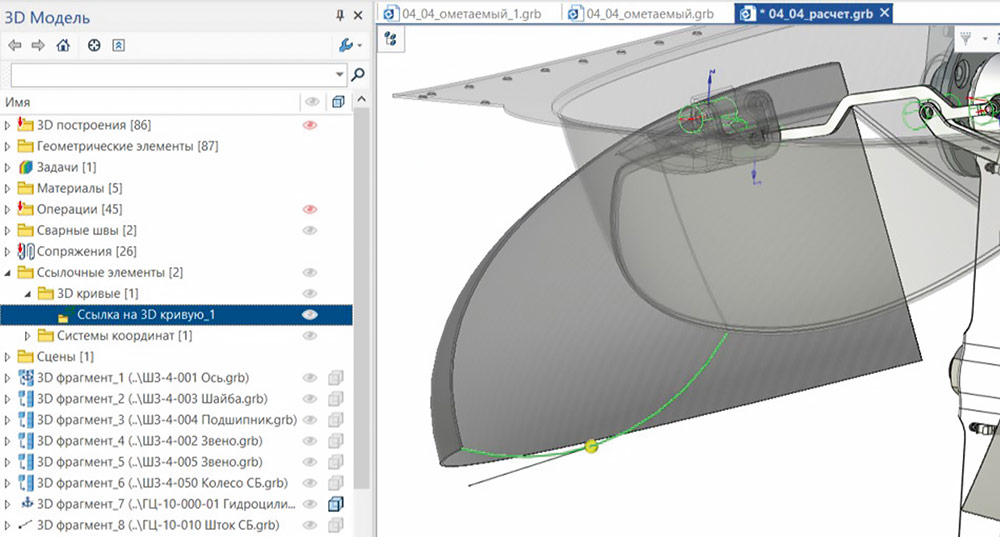
Рис. 23. 3D-кривая, построенная по траектории
На основе результатов задачи Анализ движения можно выполнить операцию Ометаемый объем. Операция позволяет получить объемный след от движения тела или набора тел.
На рис. 24 показаны ометаемые объемы для некоторых звеньев механизма щитков.
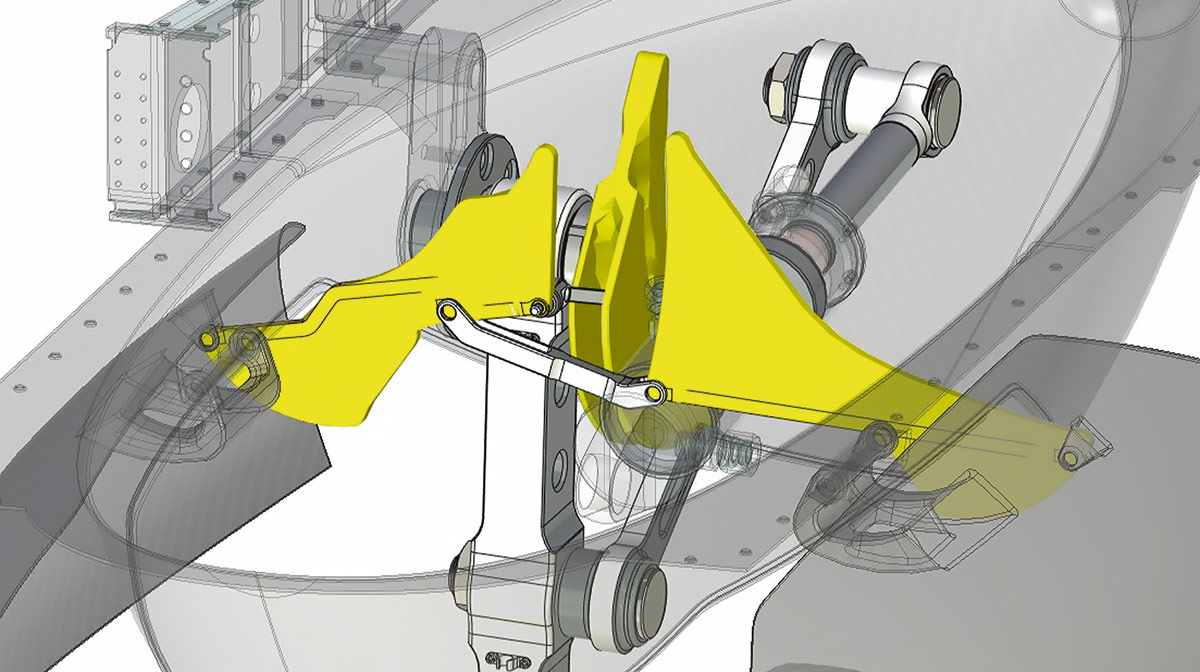
Рис. 24. Ометаемые объемы звеньев механизма щитков
У тела, построенного в результате операции Ометаемый объем, сохраняется ассоциативная связь с задачей динамического анализа. Данное тело можно использовать для обнаружения столкновений и формообразования элементов механизма.
Возможно получение нескольких ометаемых объемов для одной задачи.
Кроме рассмотренных вариантов визуализации результатов возможна выгрузка произвольного расчетного положения механизма в отдельный файл с целью выполнения других видов анализа (например, прочностного анализа в модуле T-FLEX Анализ).
Численные результаты расчета с графика (рис. 25) могут использоваться как входные параметры для других задач или выгружены в сторонние системы.
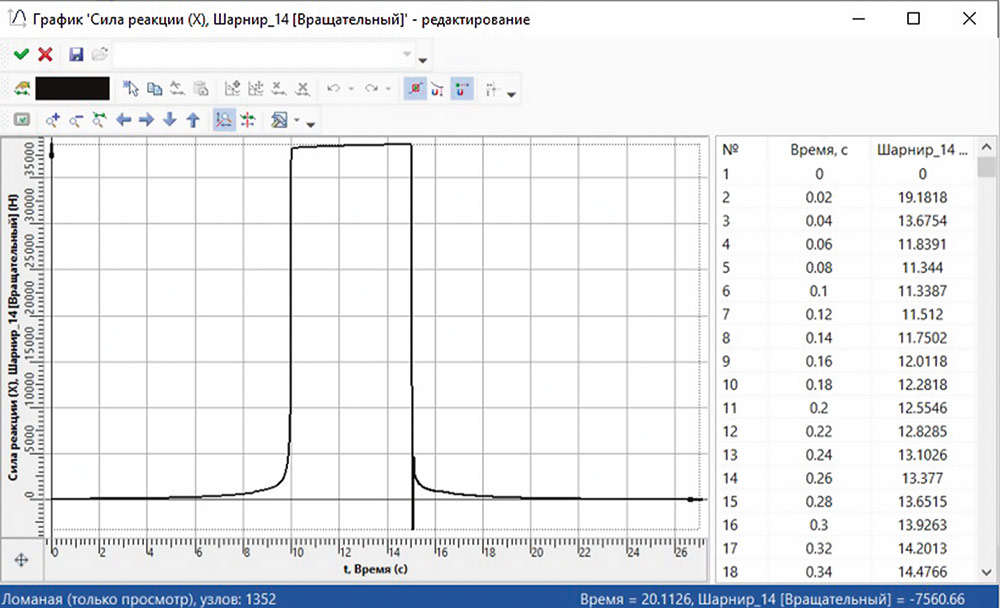
Рис. 25. Численные результаты расчета
Также доступны функции получения видеоролика движения модели и изображений, в том числе и в режиме фотореализма.
Заключение
В следующих публикациях будут более подробно представлены функциональные возможности данного модуля и методические приемы моделирования механики движения.

