
APM Dynamics — новый CAE-продукт в системе APM WinMachine
Система APM WinMachine, как известно нашим постоянным читателям, непрерывно развивается, причем ее развитие заключается не только в доработке уже существующих модулей, но и в появлении новых. В данной статье речь и пойдет об одном из них — модуле APM Dynamics.
Модуль APM Dynamics разработан как приложение к модулю конечно-элементного анализа APM Structure3D и предназначен для математического моделирования динамики многокомпонентных механических систем (ММС) в трехмерном пространстве. Это могут быть как простейшие механические системы (маятник или брошенный камень), так и сложные. Модуль APM Dynamics может применяться при проектировании, отработке, испытаниях и доводке изделий, в научных и прикладных исследованиях, а также в процессе обучения. Его использование позволяет уже на ранних стадиях проектирования получить достоверную информацию о поведении и силовых нагрузках в создаваемых изделиях. Кроме того, APM Dynamics позволяет оперативно проводить исследования нештатных ситуаций, возникающих в процессе эксплуатации уже существующих систем. С помощью математических моделей (без создания опытных образцов) можно определять характеристики работы новых систем, оптимизировать их параметры и проводить сравнительный анализ различных вариантов конструкции. В результате сокращаются сроки разработки, существенно уменьшается объем доводочных испытаний, повышается качество изделий и снижаются затраты на их создание.
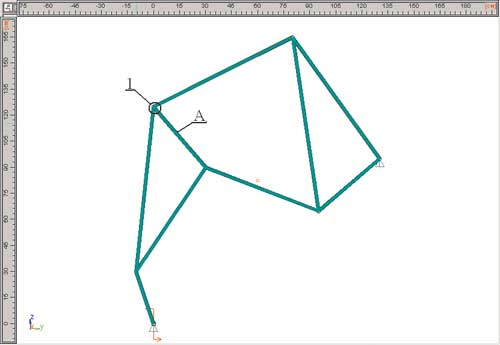
Пример плоского механизма
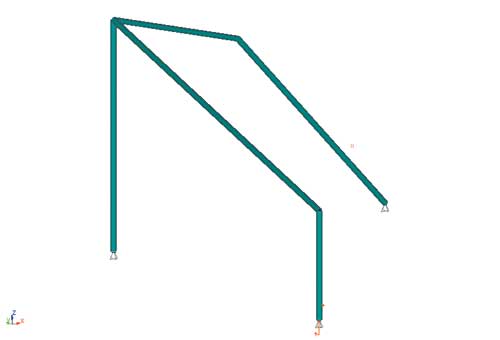
Пример трехмерного механизма
В данный момент возможности модуля ограничены моделями, состоящими исключительно из стержневых конечных элементов. Однако в ближайшем будущем планируется реализация возможности добавлять в конструкцию пластины и твердотельные элементы, а также возможности использовать в качестве элементов механизма геометрические детали произвольной формы, полученные, например, с помощью модуля трехмерного графического редактора APM Studio или из любой другой САПР с применением формата STEP.
Расчетная часть модуля основана на решении общего уравнения движения системы, которое для метода конечных элементов может быть записано в привычной матричной форме и имеет следующий вид:
Mx·· + Cx· + Kx = F,
где M — матрица, описывающая обобщенную массу системы;
x·· — вектор ускорений системы по всем ее степеням свободы;
C — матрица, описывающая обобщенное сопротивление системы;
x· — вектор скоростей системы по всем ее степеням свободы;
K — матрица, описывающая обобщенную жесткость системы;
x — вектор координат системы по всем степеням свободы;
F — вектор внешних сил, воздействующих на систему.
Данное уравнение движения представляет собой систему дифференциальных уравнений, и для получения закона движения конструкции необходимо произвести численное решение этой системы.
Вследствие того что модуль APM Dynamics функционирует как приложение к модулю APM Structure3D, его пользовательский интерфейс во многом идентичен интерфейсу APM Structure3D и пользователям, имеющим опыт работы в данной среде, потребуется минимальное время, чтобы обучиться работе в APM Dynamics.
Принципы его работы таковы:
1. Пользователь создает стержневую конечно-элементную модель при помощи инструментов, полностью идентичных соответствующим инструментам модуля APM Structure3D. При этом созданная модель может представлять собой как жесткую конструкцию, так и механизм, то есть может являться геометрически изменяемой системой, в которой возможны не только деформационные, но и кинематические перемещения. Дополнительные элементы модели — сосредоточенные массы и моменты инерции. Для моделирования предусмотрено использование различных видов шарниров: сферического, цилиндрического, поступательного, жесткого соединения и т.д.
2. К созданной конструкции прикладываются нагрузки, а также (этой возможности нет в APM Structure3D) задаются начальные условия движения, например скорости произвольных элементов системы.
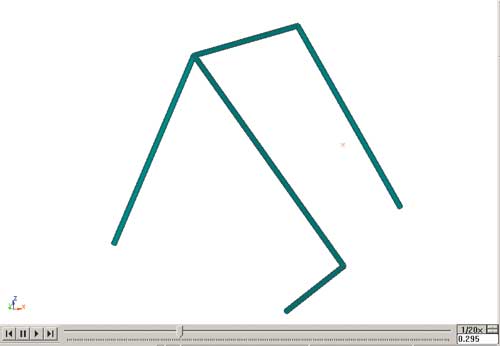
Анимация движения трехмерного механизма
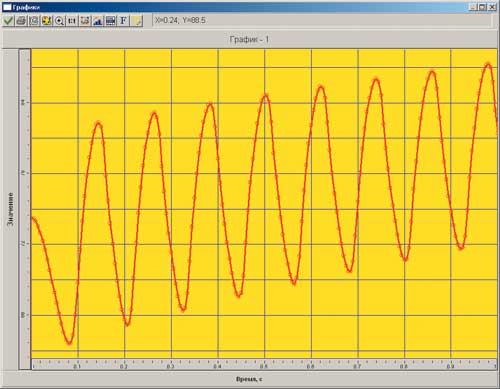
График угла поворота вокруг звена А плоского механизма
3. Следующий этап уже не характерен для модуля APM Structure и является особенностью модуля APM Dynamics. Это создание так называемых датчиков и мониторов. Датчик — средство, позволяющее накапливать значения какого-либо параметра конструкции в процессе ее движения. По умолчанию в конструкции создаются датчики перемещения системы как твердого тела (кинематических перемещений) и датчик деформационных перемещений, которые накапливают информацию о параметрах движения системы и силовых характеристиках на каждом шаге расчета соответственно. В первой версии системы пользователь может создавать следующие типы датчиков: датчики линейных смещений, скоростей и ускорений любого узла конструкции относительно глобальных координатных осей; датчик изменения угла между тремя произвольными точками; датчики угловых скоростей и ускорений любого звена и датчики сил и моментов, возникающих в любой точке конструкции. Данный список, конечно, можно дополнить, что мы и планируем сделать в ближайшее время. Затем на основе созданных датчиков создаются мониторы. Монитор — это средство, позволяющее визуализировать данные, которые накопили датчики в процессе расчета. По умолчанию создается анимационный монитор, который визуализирует данные, накопленные на датчиках перемещения системы. Кроме того, пользователь может создать мониторы, которые отображают результаты, накопленные на вышеперечисленных датчиках в виде графиков зависимостей соответствующих параметров от времени. После создания всех необходимых датчиков и мониторов модель можно считать завершенной. Пора переходить к последней стадии — к расчету динамической модели.
4. Для проведения динамического расчета созданной ранее системы необходимо задать следующие параметры: время расчета — это временной интервал, на котором требуется получить результаты о поведении системы; шаг расчета — это шаг интегрирования системы уравнений движения. Следует обратить внимание, что последний параметр может оказать заметное влияние как на время, которое требуется для выполнения расчета, так и на достоверность получаемых результатов. Время, необходимое для расчета, будет пропорционально отношению времени расчета и шага расчета. В последующих версиях планируется добавить автоматическое определение подходящего шага интегрирования в конкретный момент времени. Есть еще один параметр, который позволяет пользователю указать, рассчитывать ли динамическую модель как абсолютно жесткую или учитывать ее упругие свойства.
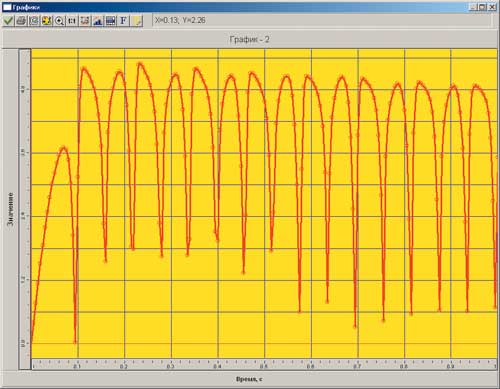
График угловой скорости звена А плоского механизма
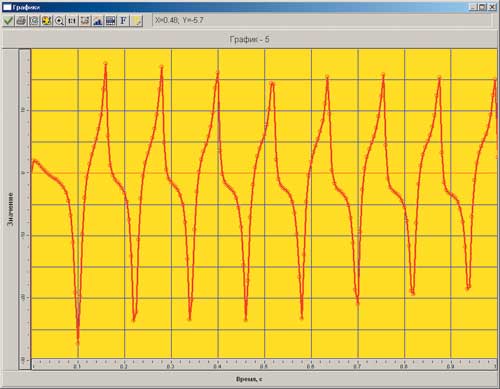
График усилия в точке 1 плоского механизма
После выполнения расчета пользователю будут выданы результаты в виде графиков зависимостей выбранных параметров системы от времени, а также будет показано, как двигается данный механизм под воздействием приложенных нагрузок во временн о м интервале от начального момента времени до заданного времени расчета.
В заключение можно отметить, что в модуле APM Dynamics, ряд возможностей которого описан выше, реализован комплексный подход к вопросам моделирования кинематических и динамических процессов. Это означает, что в данном случае задача моделирования решена в общем виде и уже сейчас может быть использована для динамического анализа более сложных случаев, включающих, помимо стержневых, твердотельные, пластинчатые оболочечные элементы и их произвольную комбинацию.
Пока можно констатировать, что интерфейсная составляющая продукта отстает от возможностей его процессорной части. Преодолеть этот разрыв мы предполагаем в ближайшем будущем. Помимо развития интерфейсной части продукта планируются работы, связанные с объединением динамических расчетов и расчетов на прочность.
Это предполагает вариант моделирования, при котором, кроме анализа параметров движения, определяется и напряженно-деформированное состояние отдельных звеньев кинематической цепи и цепи в целом.
Отметим, что для движения характерно изменение картины напряжений, а переменный характер внешнего нагружения может привести к усталостному разрушению материала деталей. Поэтому, кроме статической прочности, будут добавлены расчеты времени работы из анализа выносливости.
В современном состоянии APM Dynamics может быть использован для проектирования любых рычажных механизмов — как плоских, так и пространственных. Это позволит в ближайшем будущем полностью отказаться от одного из наших продуктов — APM Slider, который в составе системы APM WinMachine выполнял анализ кинематики плоских рычажных механизмов. APM Slider был создан более десяти лет назад, а потому его возможности уже не удовлетворяют все запросы конструкторов, занятых разработкой современных машин и механизмов.

