
Судостроение — сложная и специфическая отрасль машиностроения, отличительной особенностью которой является сочетание очень разнообразных конструкций в одном изделии. Это металлические, композитные, а порой и деревянные и даже железобетонные корпуса, имеющие сложную криволинейную наружную обшивку со множеством плоских панелей и различных балок; разнообразные механические и электрические машины, механизмы и устройства, оборудование корпусов и помещений; изоляция, отделка, декор; электроника; многие километры коммуникаций в виде труб и разных кабелей и многое другое. И, учитывая сложность создаваемого объекта, современный эффективный процесс проектирования и постройки судна на всех этапах — от эскизных проработок до сдачи заказчику — должен быть не только основан на 3D-моделировании, но и обязательно иметь в своей структуре систему хранения данных и управления ими. Схематично этот процесс показан на рис. 1, причем 3D-модель (геометрию) в этой схеме можно назвать физическим отображением проекта,
а базы данных — информационным его наполнением, которое этой геометрией и управляет.
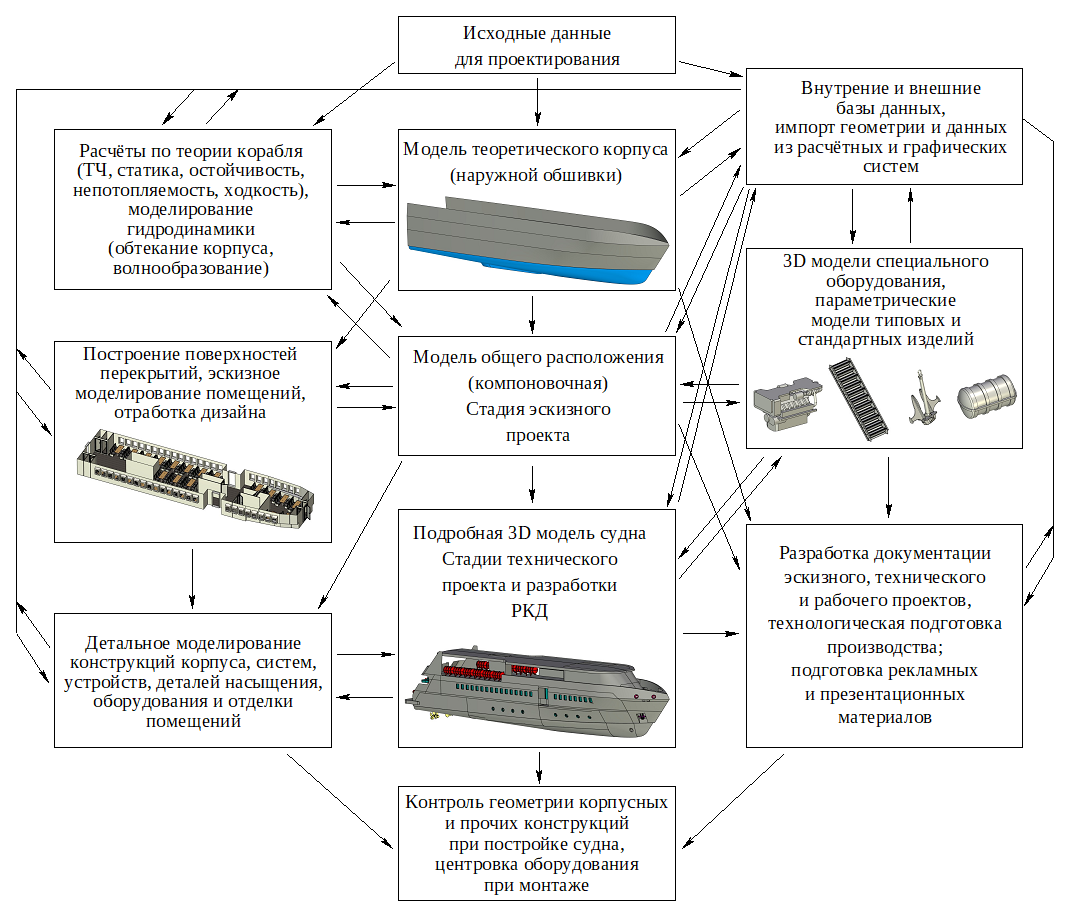
Рис. 1. Структура проекта судна на основе 3D-модели
Выделение отдельной системы для хранения и обработки данных необходимо для повышения эффективности работы с информацией о проекте. Это облегчает передачу данных между отдельными частями проекта и между разными проектами, позволяет быстро создавать различные проектные варианты, хранить их в компактной форме и проводить сравнительный анализ, а также исключает необходимость повторного ввода и дублирования информации в разных файлах проекта. По отношению к 3D-модели такая система может быть как внешней — в виде отдельного программного обеспечения или отдельных табличных или текстовых файлов, так и внутренней — в виде встроенных в используемую для построения 3D-модели САПР редакторов работы с переменными и базами данных, хранящих данные непосредственно в файле 3D-модели. Можно применять одновременно и внешние, и внутренние хранилища данных.
Для эффективной работы с системой обработки данных и сама 3D-модель должна быть легко изменяемой: используемая для ее построения САПР должна обеспечивать изменение размеров, формы и структуры 3D-модели в необходимых пределах по заданным значениям.
В данной статье в качестве примера рассматривается построение параметрической (то есть управляемой параметрами — переменными величинами) 3D-модели теоретической поверхности наружной обшивки корпуса судна (далее — модель корпуса) с использованием внутренней системы обработки данных в САПР T-FLEX CAD 17 на начальном этапе проектирования судна.
Общий вид модели корпуса и способ ее построения
На рис. 2 показана готовая 3D-модель корпуса, принадлежащего быстроходному водоизмещающему пассажирскому судну относительно небольших размеров. В ней можно выделить две основные части: днищевую, выделенную цветом, которая и является объектом рассмотрения, и верхнюю — надводную часть основного корпуса с надстройкой, показанную упрощенно, так как ее моделирование является отдельной задачей, здесь не рассматриваемой.
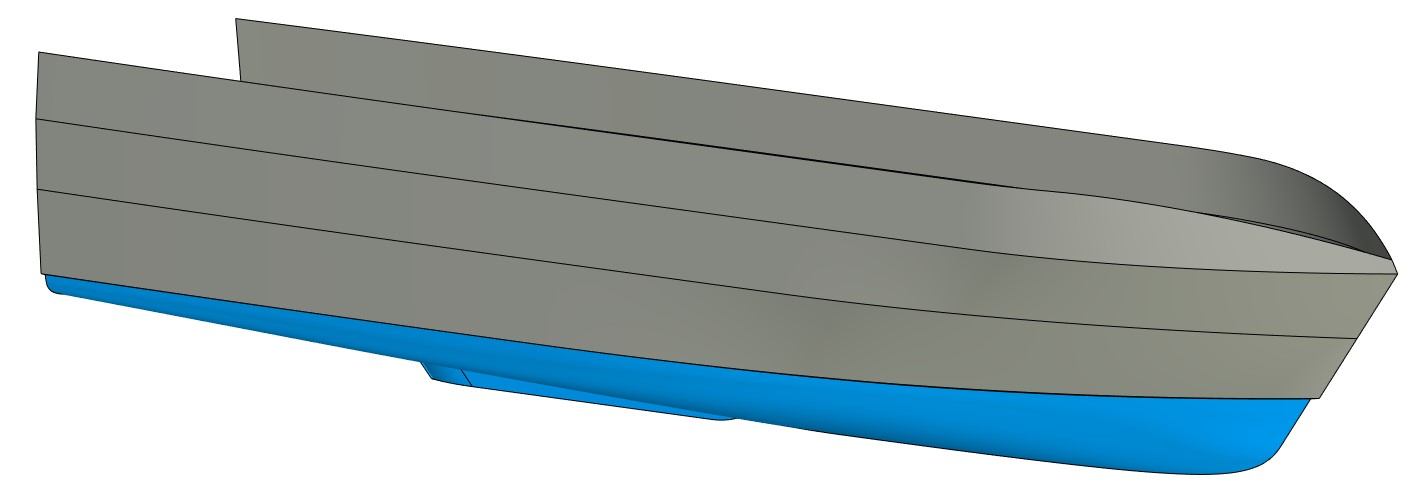
Рис. 2. 3D-модель корпуса судна
Для выбранного в качестве примера судна характерен круглоскулый корпус с узким носом, транцевой кормой с небольшим погружением и пологим подъемом днища. Поверхность обшивки такого корпуса имеет двойную кривизну и не развертывается полностью на плоскость. Она будет построена по двум наборам кривых:
- поперечным сечениям: транцу, двум кормовым и двум носовым сечениям, форштевню;
- продольным направляющим: профилю киля (батокса ДП), ватерлинии при расчетной осадке (КВЛ), условной палубной линии (днищевая часть корпуса в данном случае включает часть наружной обшивки от киля до линии слома. Верхней границей моделируемой поверхности будет плоскость, находящаяся выше этой линии; в дальнейшем при сопряжении с верхней частью корпуса днищевая часть отсекается по линии слома).
На рис. 3 приведены проекции этих кривых, а на рис. 4 показано построение поверхности корпуса операцией Тело по сечениям (саму операцию рассматривать подробно не станем — ее построение не представляет сложности), наборы линий отмечены разными цветами, а также готовая поверхность обшивки с этими линиями и плоскостями ОП и ДП.
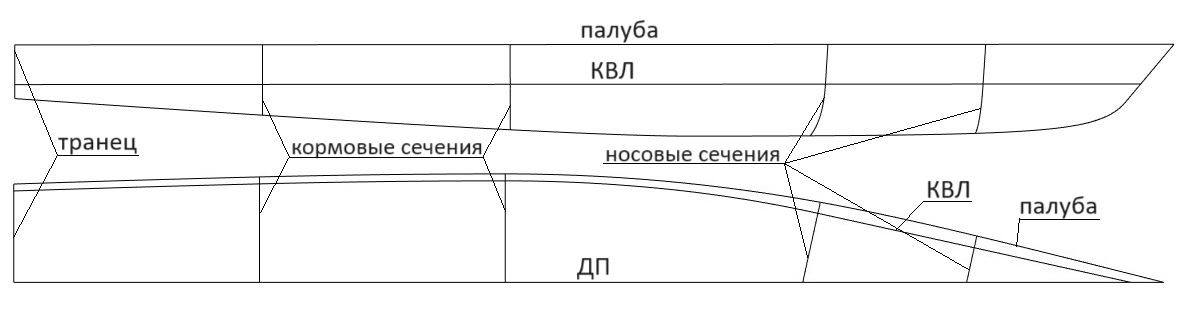
Рис. 3. Проекции кривых для построения поверхности обшивки
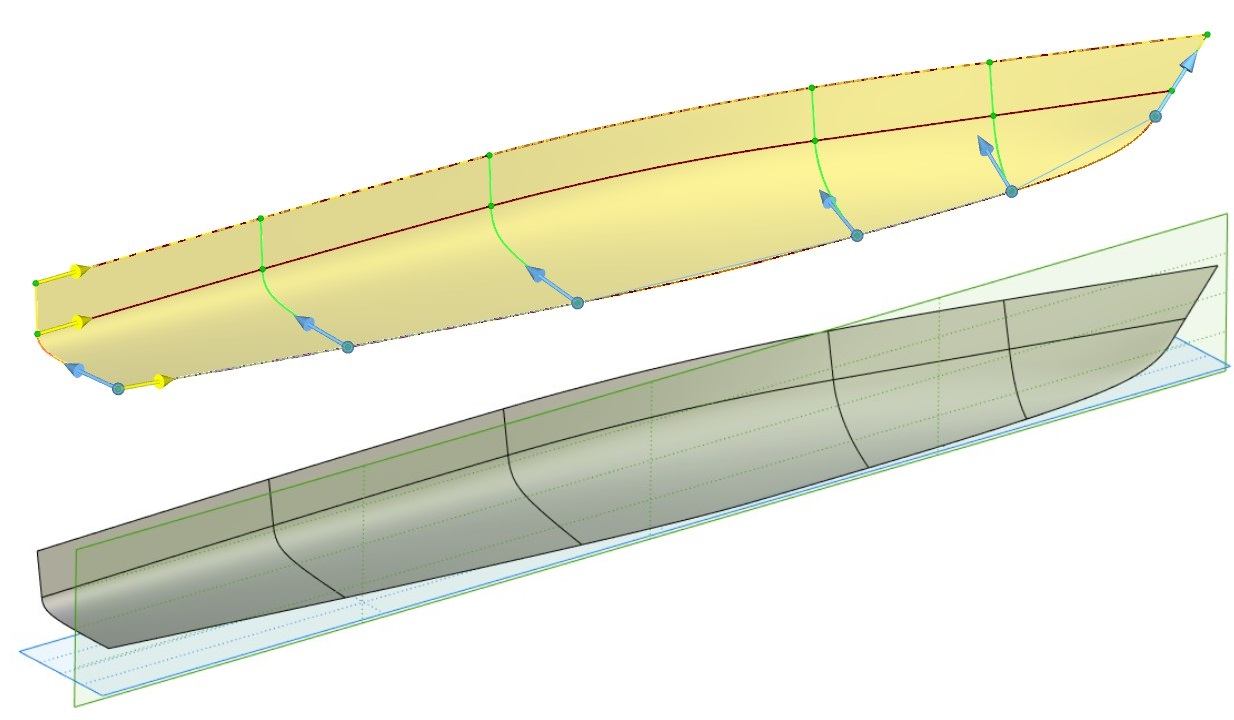
Рис. 4. Построение поверхности обшивки операцией Тело по сечениям (вверху) и модель поверхности обшивки (внизу)
Управление геометрией с помощью переменных в САПР T-FLEX CAD 17
Параметрические возможности системы T-FLEX CAD позволяют с помощью переменных изменять размеры геометрических элементов 3D-модели, скрывать или отображать отдельные тела и элементы построения, например управлять видимостью линий в 3D-профиле. На рис. 5 показан общий вид редактора переменных, который используется как основное средство для работы с переменными. Значения переменных могут определяться разными способами:
- задаваться пользователем как переменная ВД;
- приниматься по базе данных (на рисунке примера нет);
- определяться по результатам измерений геометрии, например переменная XD;
- вычисляться с использованием математических выражений как переменная S_м;
- выбираться из нескольких возможных вариантов по условию, как переменная T.
Указанные выше способы работы с переменными позволяют производить расчеты внутри самой 3D-модели, создавать ограничения и возможность выбора варианта, получать обратную связь с моделью — сравнивать результаты замеров по построенной геометрии со значениями, к которым стремится пользователь. В данной модели используется очень много переменных, поэтому для большего удобства работы с переменными была создана специальная страница — диалог (рис. 6). Он состоит из нескольких блоков, каждый блок связан с определенной частью модели либо с выполнением связанных расчетов. Эти блоки переменных будут показаны при рассмотрении построения соответствующих им профилей и направляющих. Кроме того, отметим, что в диалоге, чтобы его не перегружать, отражены не все переменные — часть из них, которые предполагалось корректировать лишь изредка, доступна только в редакторе переменных.
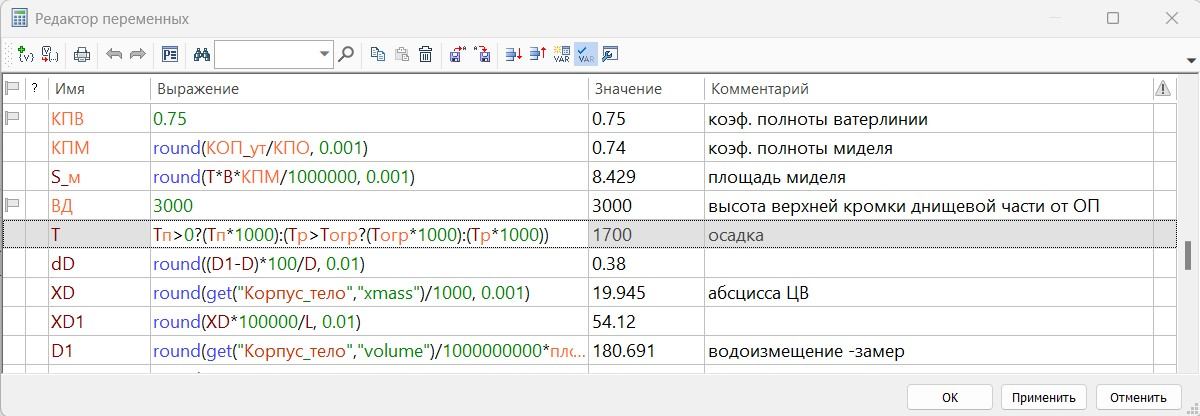
Рис. 5. Редактор переменных в системе T-FLEX CAD
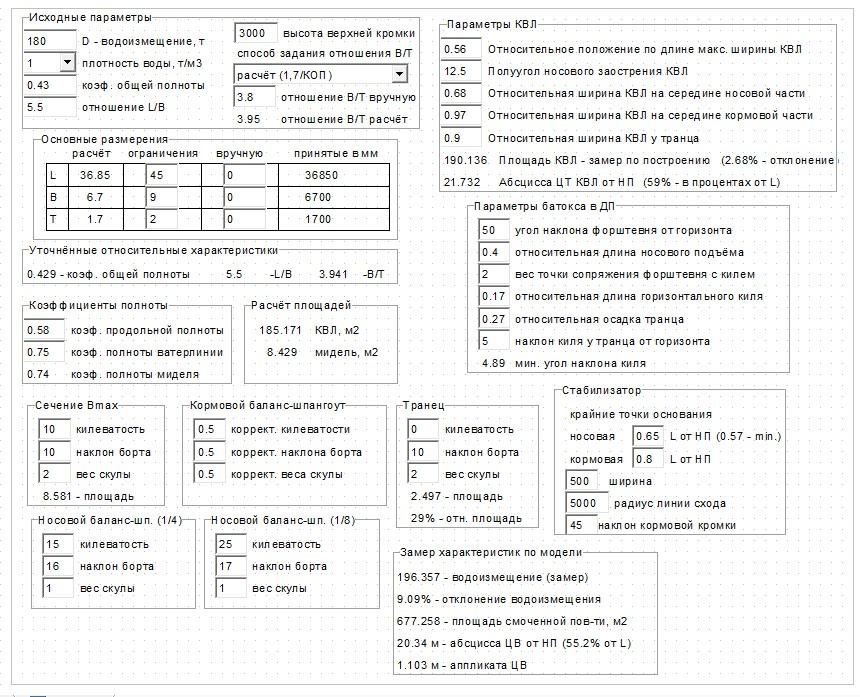
Рис. 6. Общий вид диалога переменных
Определение главных размерений проектируемого корпуса
Первый блок диалога, показанный на рис. 7, — это блок расчета главных размерений и относительных показателей корпуса. Он служит для ввода в модель основных геометрических характеристик корпуса.
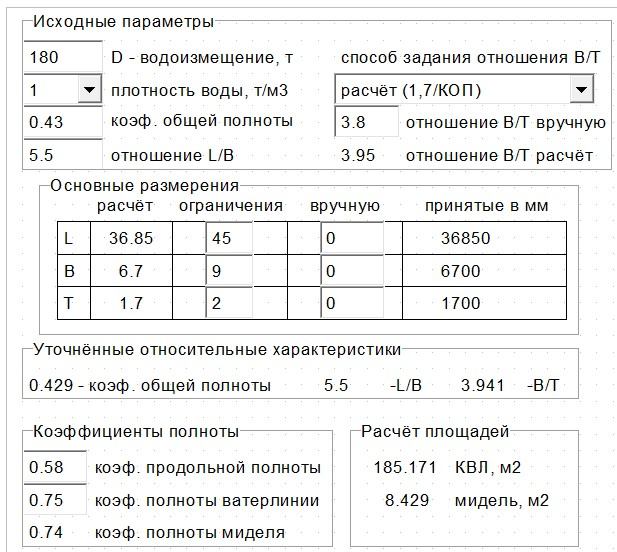
Рис. 7. Блок основных размерений диалога переменных
В этом блоке пользователь указывает необходимые значения водоизмещения D, плотности воды ρ (выбор пресной или морской воды), коэффициента общей полноты δ и отношения L/B. Отношение B/T может быть задано пользователем или рассчитано по коэффициенту общей полноты. Основные размерения судна рассчитываются исходя из уравнения D = ρ*δ*L*B*T в порядке: B, L, T, по заданным данным, но при этом пользователь может их ограничить либо задать величины размерений вручную на случай, если их расчет не требуется. При задании вручную ограничения не применяются. В последнем столбце таблицы приводятся величины, которые принимаются в модели. По принятым значениям L, B, T пересчитываются величины коэффициента общей полноты, отношений L/B, B/T. Это необходимо при ручном вводе значений размерений или применении ограничений. Также в этом блоке пользователь указывает необходимые коэффициенты продольной полноты φ и полноты ватерлинии α. Коэффициент полноты миделя β рассчитывается автоматически. По коэффициентам полноты определяются требуемые площади ватерлинии и миделя. В рассматриваемом варианте модели значения площадей не используются напрямую для построения геометрии, они выдаются пользователю как ориентир и применяются для расчета отклонения замеренных по построенной модели характеристик от требуемых.
Параметры продольных направляющих и их построение
Второй блок диалога, показанный на рис. 8, содержит в себе параметры первой из продольных направляющих — КВЛ. Схема построения ватерлинии показана на рис. 9, где указаны переменные и выражения для задания размеров геометрии (имена переменных — по рис. 8, символы «=()» обозначают равенство соответствующих отрезков). Носовая и кормовая ветви ватерлинии построены отдельно 3D-путями как сплайны. В точке их соединения (в сечении наибольшей ширины) им задается условие касания к линии, параллельной ДП. Для носовой ветви в точке примыкания к ДП задано условие касания с линией, проходящей под углом, заданном переменной «угол_2н».
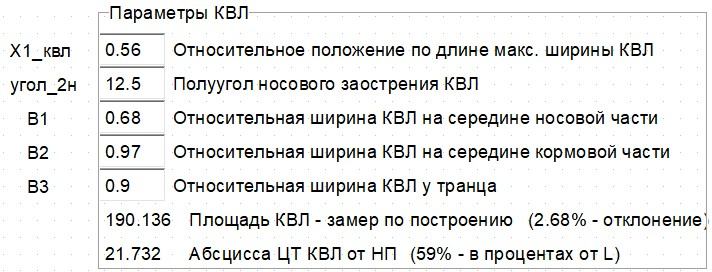
Рис. 8. Блок параметров КВЛ
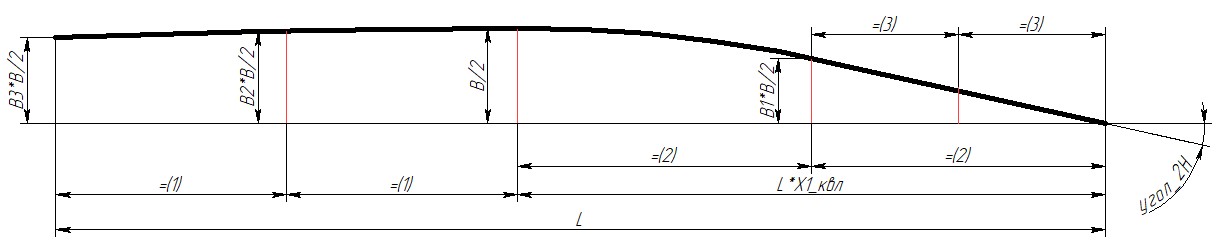
Рис. 9. Схема построения линии КВЛ
В данном блоке также отображаются некоторые результаты замеров модели: значения площади ватерлинии, отклонения замера от расчетного значения и абсциссы центра тяжести ватерлинии (абсолютное и относительное значения). Эти значения обновляются после пересчета модели после ввода (и/или изменения) значений переменных.
Верхняя кромка (условная палубная линия) построена аналогично, но с привязкой к верхним точкам поперечных сечений.
Третий блок (рис. 10) содержит параметры второй направляющей линии — батокса в ДП. Схема построения батокса показана на рис. 11. Построение этой линии в целом аналогично построению ватерлинии. Участки между прямым форштевнем и горизонтальным килем, а также от горизонтального киля до транца строятся 3D-путями — сплайнами. Кроме крайних точек, сплайны включают угловые точки: Т1 и Т2, которые лежат на пересечении линии ОП и линий форштевня и линии наклона кормовой части днища соответственно. Угловая точка в сплайне имеет параметр — вес точки, с помощью которого можно управлять кривизной сплайна: чем больше величина веса точки, тем ближе сплайн проходит к ней, и тем больше кривизна сплайна на этом участке. Вес точки Т1 задается переменной, вес точки Т2 в данной модели установлен равным 1, но и для него при необходимости может быть установлена переменная. Кормовая часть линии батокса в ДП также управляется переменной наклона киля у транца. Во избежание сбоев построения геометрии (при очень малых углах наклона линия наклона днища переходит в область носового подъема днища) на переменную угла введено ограничение на его минимальное значение; переменная не сможет принять значение ниже этого ограничения.
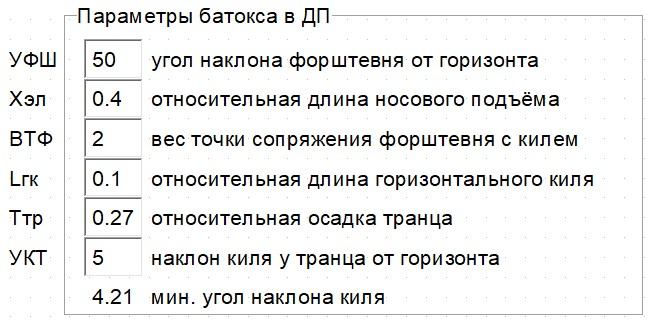
Рис. 10. Блок параметров батокса в ДП

Рис. 11. Схема построения линии батокса в ДП
Параметры поперечных сечений и их построение
Четвертый блок переменных, показанный на рис. 12, состоит из нескольких маленьких блоков, содержащих переменные поперечных сечений: сечения наибольшей ширины (в точке соединения носовой и кормовой ветвей ватерлинии), транца, промежуточных сечений: кормового (на середине кормовой ветви ватерлинии) и двух носовых (баланс-шпангоутов на середине и в первой четверти носовой ветви ватерлинии — см. рис. 9). Носовые сечения расположены перпендикулярно к профилю КВЛ. Строятся эти сечения одинаково с помощью 3D пути-сплайна по трем точкам: в ДП, на уровне КВЛ и угловой точке, которая задается углами килеватости и наклона борта (рис. 13 — сечение профиля наибольшей ширины). Угловые точки имеют параметр веса, аналогично рассмотренному выше в профиле батокса ДП. Профиль выше КВЛ достраивается прямым отрезком.
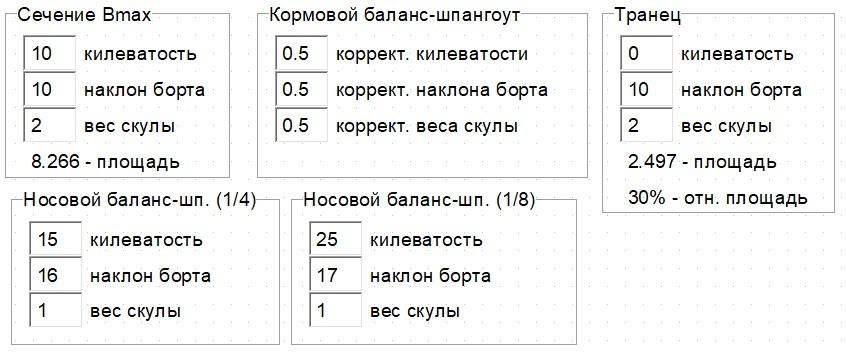
Рис. 12. Блок параметров поперечных сечений
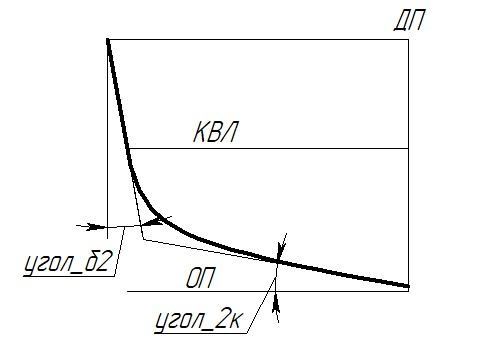
Рис. 13. Схема построения поперечного сечения
Некоторое отличие имеет профиль кормового промежуточного сечения: его параметры рассчитываются по аналогичным параметрам сечения наибольшей ширины и сечения транца с учетом на коэффициент корректировки. Это сделано для обеспечения плавного изменения профиля от миделя к корме, где, в отличие от носовой части, не предполагается значительных изменений формы шпангоутов. Коэффициенты корректировки позволяют в некоторых пределах варьировать форму обвода кормовой части корпуса: при коэффициенте, равном 0, параметр промежуточного сечения равен параметру транца; при значении, равном 1 — параметру сечения наибольшей ширины; при значении, равном 0,5 — их среднему арифметическому значению.
Также в этом блоке отображаются замеренные по перестроенной модели величины погруженных площадей сечения наибольшей ширины и транца, и их отношение (площадь транца в процентах от площади сечения наибольшей ширины).
Последним блоком построения геометрии является блок параметров стабилизатора, приведенный на рис. 14. Схема построения стабилизатора приведена на рис. 15. На положение носовой кромки стабилизатора наложено ограничение — нижняя точка этой кромки не может располагаться носовее точки Т2 (см. рис. 11). Стабилизатор в данной модели имеет упрощенную форму, рассматривать более подробно его построение мы не будем, но стоит отметить, что ему можно придать совершенно любую форму и управлять ею так же, как и геометрией корпуса.
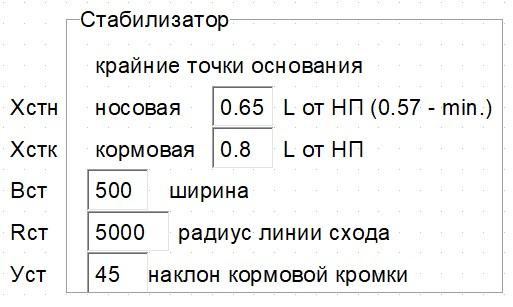
Рис. 14. Блок параметров стабилизатора
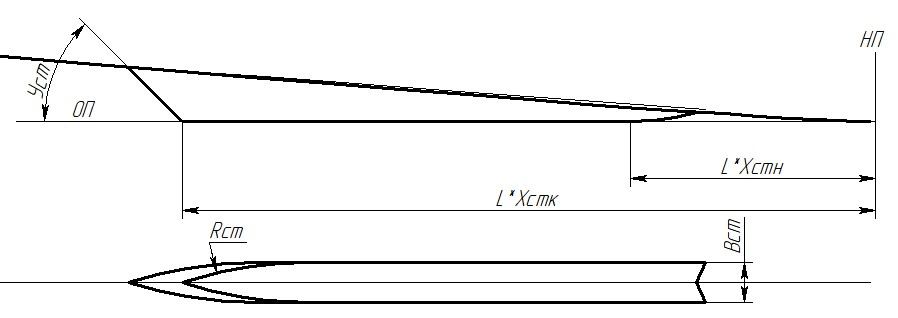
Рис. 15. Схема построения стабилизатора
Последний блок диалога содержит в себе только результаты измерения модели: водоизмещение (с расчетом отклонения от заданного), площадь смоченной поверхности, абсцисса и аппликата центра величины. Сюда могут быть добавлены и другие величины, необходимые пользователю. Объединение результатов замеров в отдельный блок не обязательно, они могут быть размещены и в других блоках (примеры см. выше). Задача этого блока — дать пользователю информацию о фактических размерах построенной модели для оценки ее соответствия требуемым характеристикам. Результаты замеров обновляются каждый раз при пересчете модели (рис. 16).
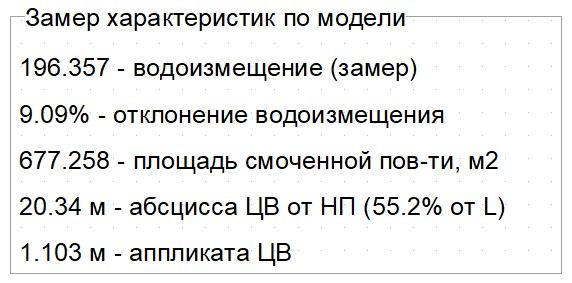
Рис. 16. Блок результатов измерения модели
Обеспечение качества поверхности и его контроль
Для возможности использования модели корпуса судна построенная поверхность должна обладать определенным качеством, а именно:
- в ней должны отсутствовать разрывы между смежными гранями, которые возникают при построении модели из отдельных сопрягающихся поверхностей, в данной 3D вся поверхность строится одной операцией, необходимость в сшивке отсутствует;
- криволинейные поверхности модели должны быть плавными и ровными, без волн, с плавным изменением кривизны. Это достигается за счет оптимального количества кривых для построения поверхности, способа их построения и их взаимной увязки. При слишком малом наборе кривых, возможно, не удастся обеспечить нужную форму корпуса, при большом их количестве сильно возрастает сложность геометрической увязки сечений, при их недостаточном согласовании поверхность получится волнистой, потребуется ее сглаживание. В данной 3D-модели количество профилей и направляющих минимально, но достаточно для получения нужной формы корпуса. При необходимости в модель могут быть введены дополнительные профили. Плавность формы модели также обеспечивается самим пользователем: при вводе параметров сечений он должен визуально контролировать получаемую поверхность;
- но в первую очередь необходимо обеспечить построение самой поверхности. Так, профили одного направления не должны пересекаться (но могут соединяться в одной из конечных точек), линии разных направлений, наоборот, должны пересекаться, иначе построение поверхности по этим линиям будет невозможно. Для обеспечения этого условия в рассматриваемой модели применяются 3D-узлы, которые строятся при построении линий одного направления (например, продольного), а затем используются для привязки профилей второго направления.
Контроль качества полученной поверхности можно проводить специальными инструментами, например на рис. 17 показан контроль гладкости модели (вверху) и контроль кривизны модели (внизу).
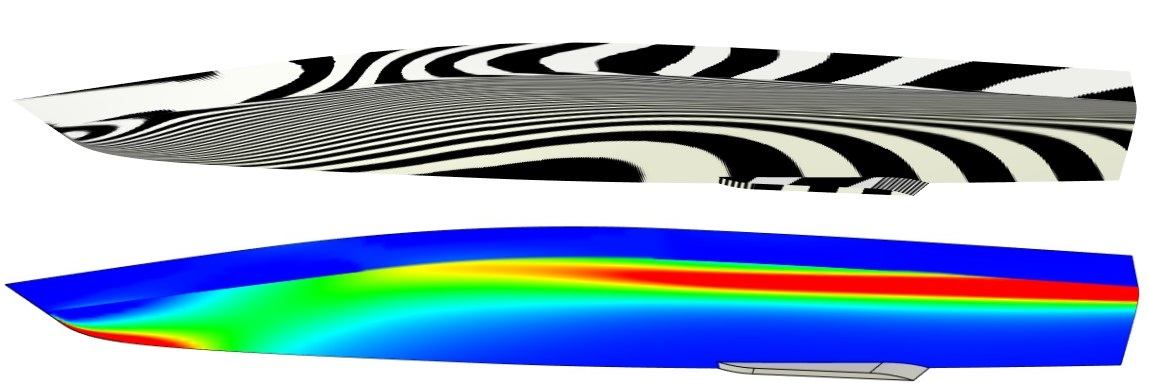
Рис. 17. Контроль гладкости и кривизны модели
Общий порядок моделирования корпуса судна
Моделирование корпуса, как и любой творческий процесс, может идти различными путями, в зависимости от поставленных задач. В рассматриваемом примере общий порядок следующий:
- Моделирование начинается с модели днищевой части корпуса: по заданным условиям рассчитываются и (или) задаются главные размерения и основные геометрические относительные величины, устанавливаются параметры продольных и поперечных сечений, после чего выполняется пересчет модели.
- После пересчета модели автоматически измеряются фактические геометрические параметры модели, и если они не соответствуют требуемым, то пользователь может скорректировать заданные переменные и снова пересчитать модель. Такие корректировки производятся до тех пор, пока не будет получена требуемая форма корпуса.
- После пересчета модели кроме проверки геометрических параметров также контролируется качество поверхностей.
- Далее достраивается надводная часть основного корпуса и надстройка. Данная часть корпуса также может быть параметризована. Сопряжение днищевой и надводной частей корпуса может производиться по-разному: с плавным переходом, со сломом или с уступом.
- После этого строятся поверхности транца, якорные ниши и прочие элементы экстерьера, связанные с наружной обшивкой.
Использование модели корпуса
Возвращаясь к рис. 1, необходимо отметить, что рассмотренная модель корпуса судна является базовым элементом проекта судна. Правильно подобранные параметры модели в значительной мере обеспечивают качество всего проекта, и рассмотренный способ управления ими облегчает поиск наиболее оптимального варианта из большого их разнообразия, имеющегося на начальном этапе проектирования. Описанная модель также может быть использована при исследовательском проектировании судна, так как позволяет быстро создать и проанализировать очень большое количество вариантов корпуса.
В рассмотренном варианте модель построена в стандартной версии T-FLEX CAD 17 без применения плагинов и прочих специальных инструментов. Но для ускорения анализа (различных расчетов) прорабатываемых вариантов, дальнейшего моделирования корпуса и всех остальных элементов судна могут широко применяться все возможности различных модулей платформы T-FLEX PLM: создание пользовательских библиотек, специальных API-приложений (плагинов), анализ прочности конструкций, технологическая подготовка производства, управление проектом и производством.

